¶ 1.快速开始
¶ 1.1 AIbox连接配对
网页版: MicroBlocks-AIBOX 编程界面。
离线版下载:Microblocks.exe
在 MicroBlocks 页面中,可以通过两种方式连接设备。优先推荐无线连接。
-
无线连接
- 务必使用 Chrome 或 Edge 浏览器,打开MicroBlocks界面。
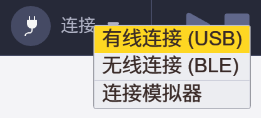
2. 确保已开启计算机的蓝牙功能。 3. 长按开关3秒(开关按键位于机器人底部),给机器人开机。开启之后,机器人屏幕上会显示三个字符,代表 BLE 的编号。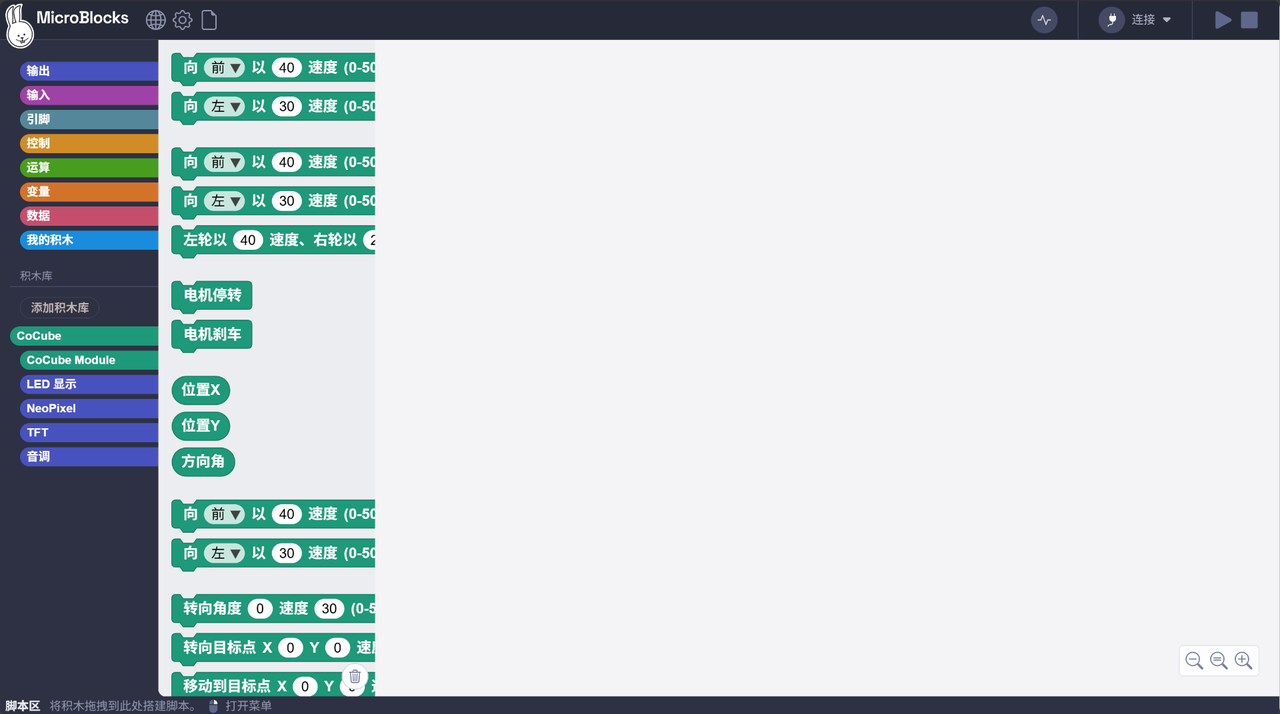 4. 点击 MicroBlocks 界面上的“USB”图标,点击无线连接(BLE)。
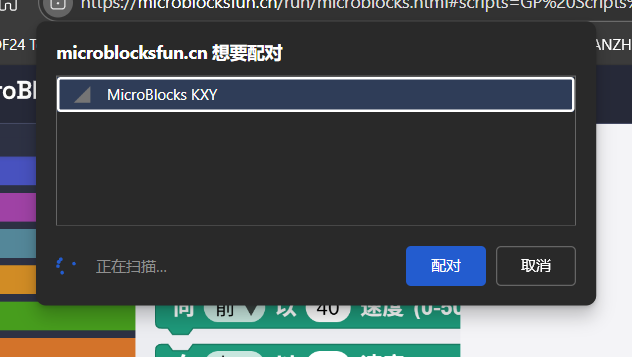
4. 点击 MicroBlocks 界面上的“USB”图标,点击无线连接(BLE)。 5. 正常情况下,可以识别出“MicroBlocks XXX”或者“CoCube XXX”的字样,XXX 与机器人开机显示的编号一致。
5. 正常情况下,可以识别出“MicroBlocks XXX”或者“CoCube XXX”的字样,XXX 与机器人开机显示的编号一致。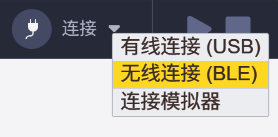
-
有线连接
- 推荐使用 Chrome 或 Edge 浏览器,打开 MicroBlocks-AIBOX 编程界面。
- 用 USB 线缆连接电脑和 AIbox。
- 长按开关3秒(开关按键位于机器人底部),给 AIbox 机器人开机。
- 点击 MicroBlocks 界面上的“USB”图标,点击有线连接。
- 正常情况下,可以识别出串口(在 Windows 系统下为
COM***,在 macOS 系统下为cu.wchusbserial***)。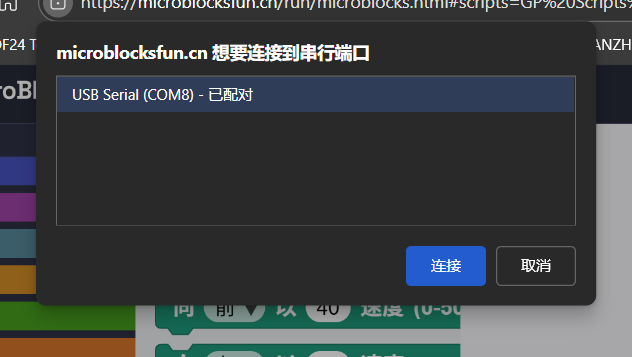
- 若无法正常识别出串口,则可能是电脑没有安装串口驱动,需要安装 CH343 串口转 USB 芯片的驱动。
- 若还无法连接,请检查 USB 线缆是否正常。
¶ 1.2 AIbox固件更新
第一次使用设备时,请为 AIBOX 更新最新的固件,以获得最佳体验。
请有线连接 AIBOX 机器人。
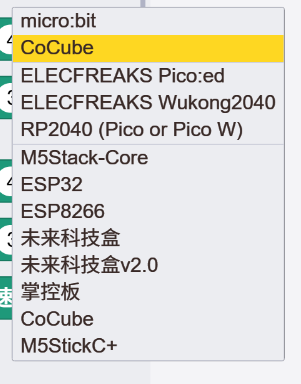
- 点击 MicroBlocks IDE 的设置,点击“升级主板固件”,选择“CoCube”,选择对应的端口号。
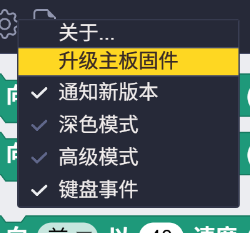
- 升级过程大约需要1分钟,在过程中请保持 MicroBlocks IDE 位于浏览器显示界面。期间尽可能不要有其他任何操作。否则有可能导致固件升级失败,如果升级失败,请重新升级一次。
¶ 1.3 MicroBlocks 图形化编程平台使用
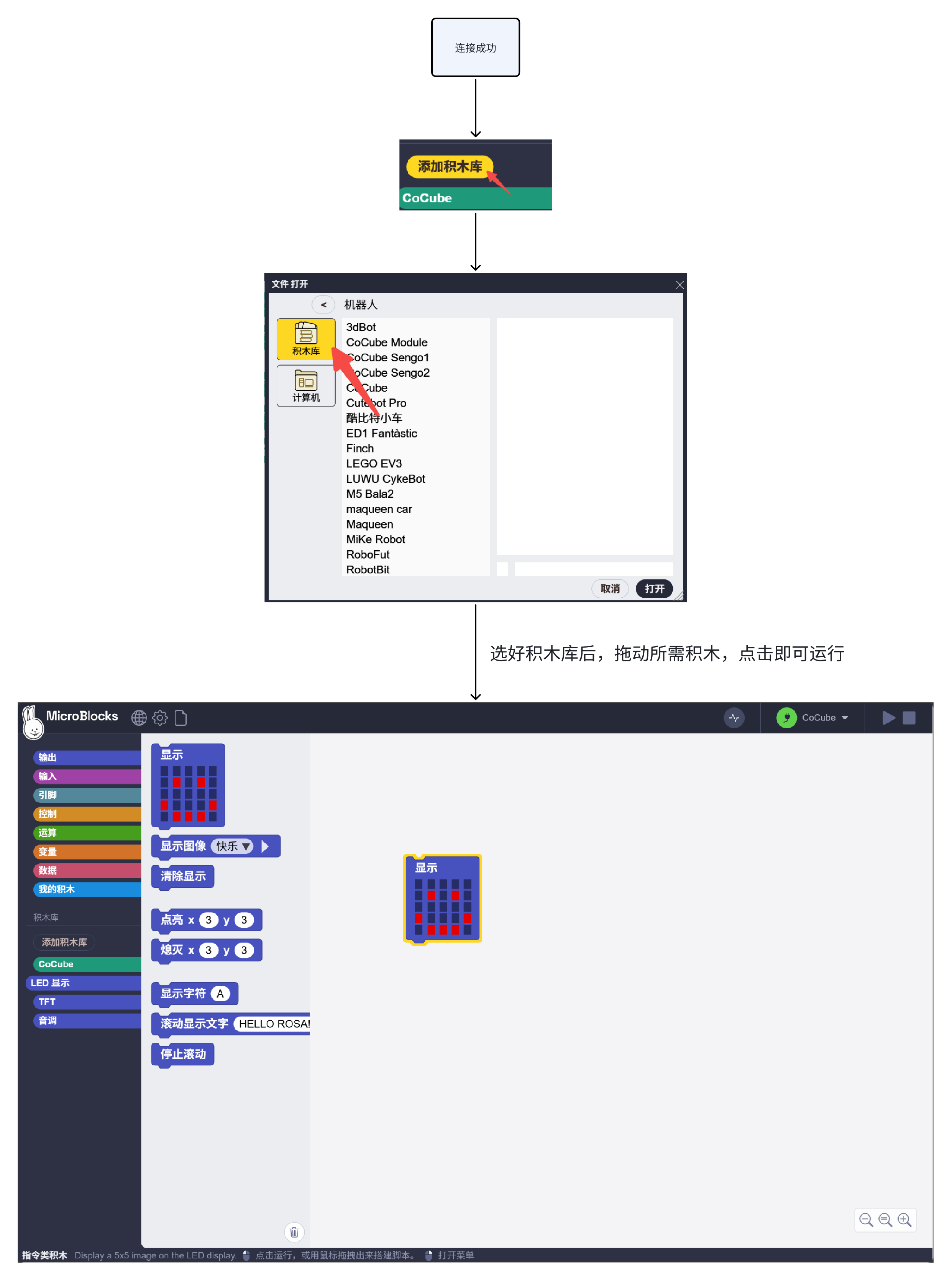
- 连接设备: 通过有线或者无线方式,连接 MicroBlocks IDE 与 AIbox 机器人。
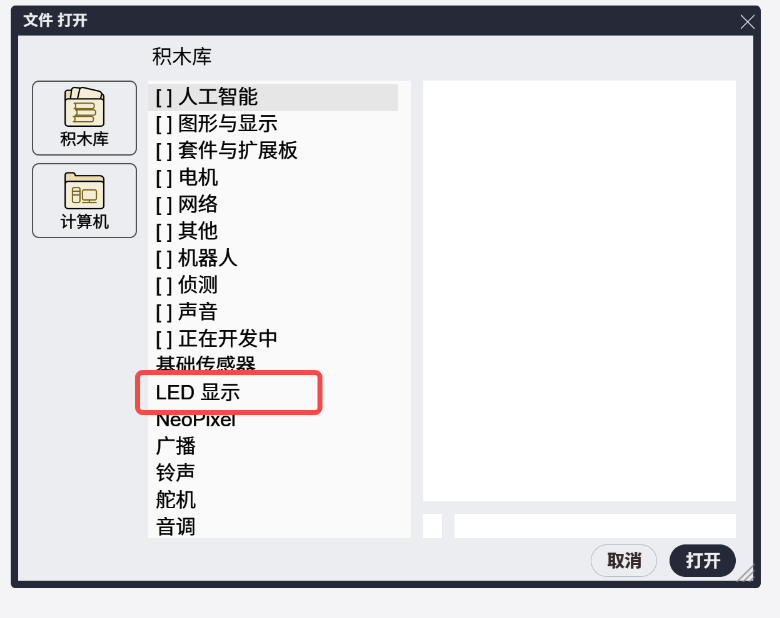
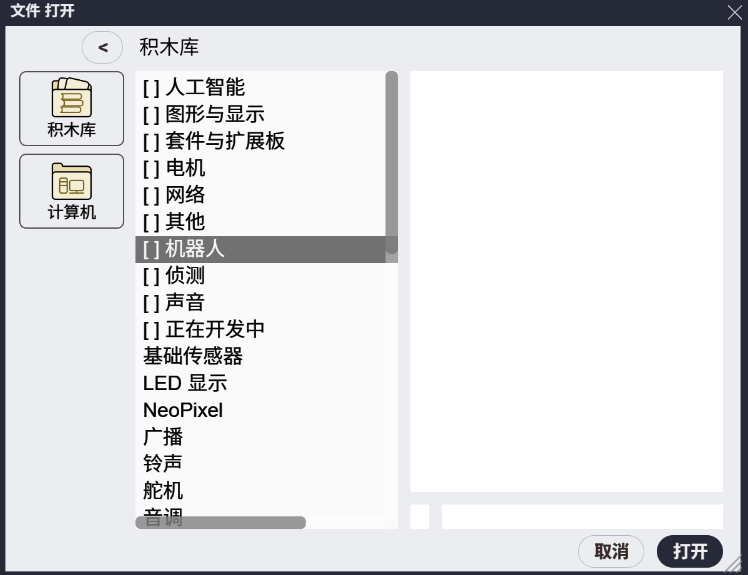
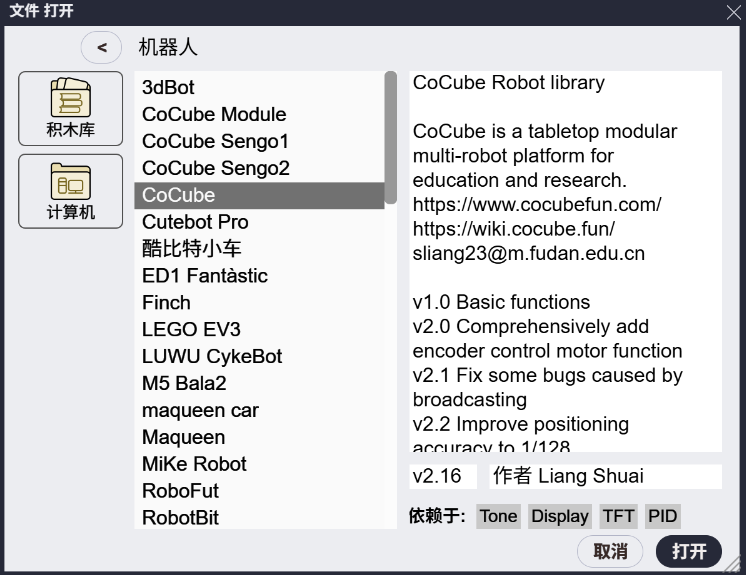
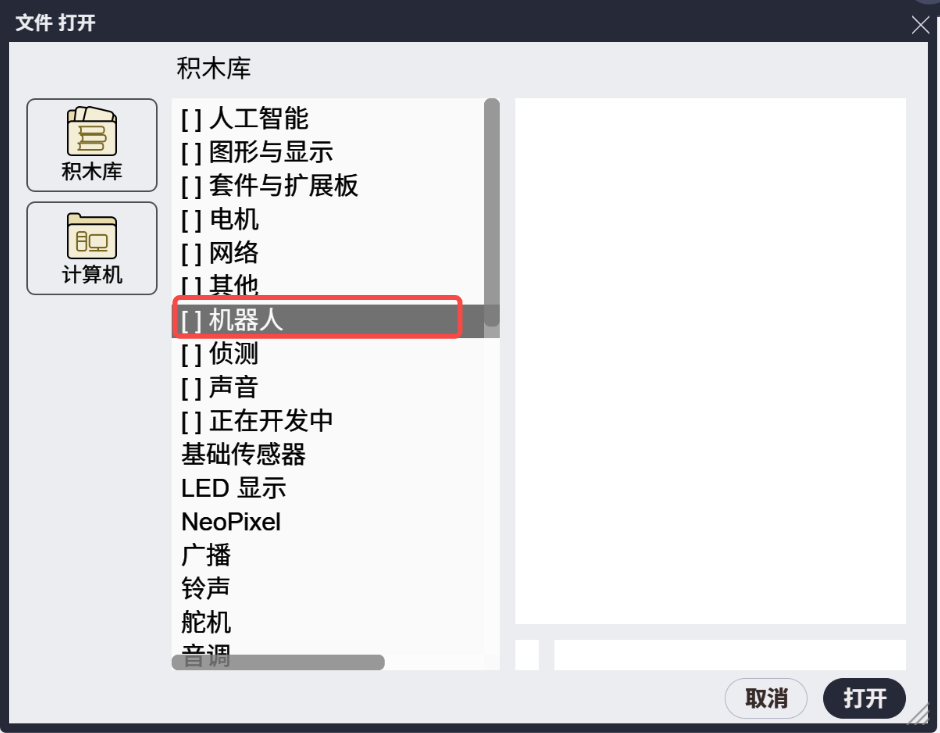
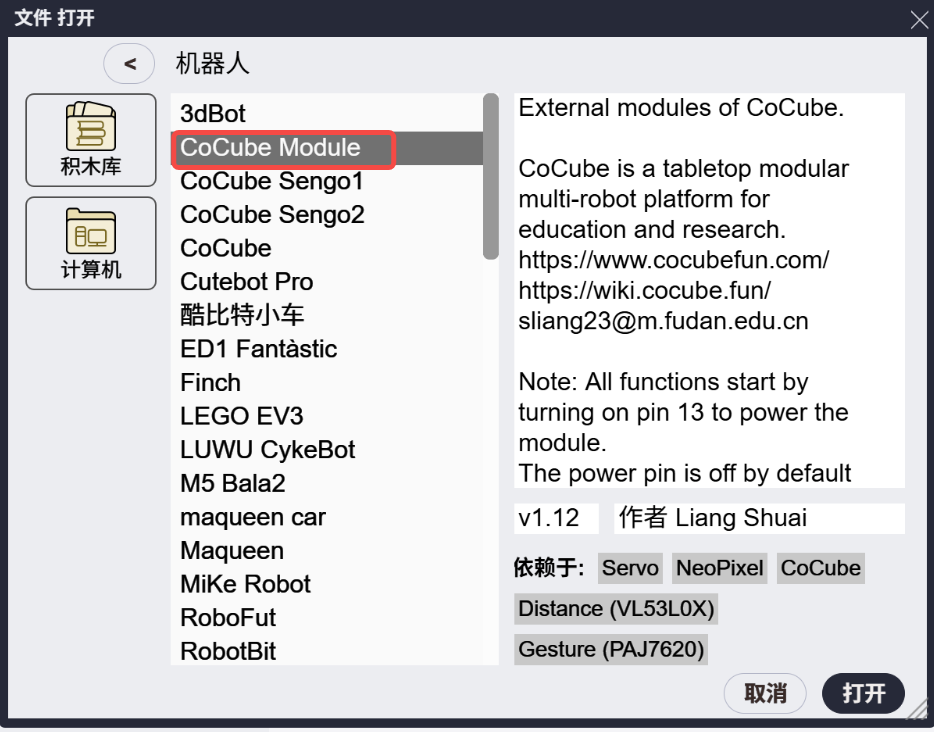
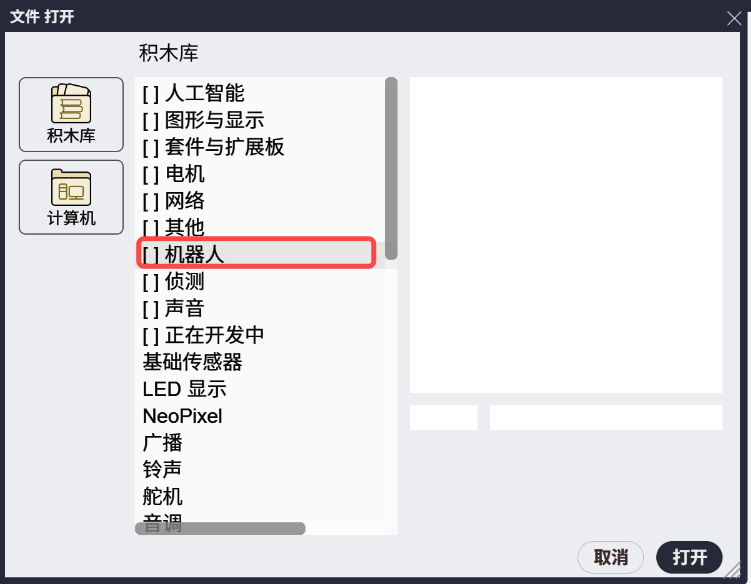
- 添加积木库: 点击【添加积木库】按钮,选择对应积木库。
- 找到积木: 在基本操作库或积木库中找到相应积木块,并拖拽至工作区。
- 执行程序: 左键单击积木块。当积木块周围亮起黄色光环时,表示程序已成功执行,可以观察到机器人变化。
¶ 2.Basic
¶ 2.1 LCD屏幕控制
-
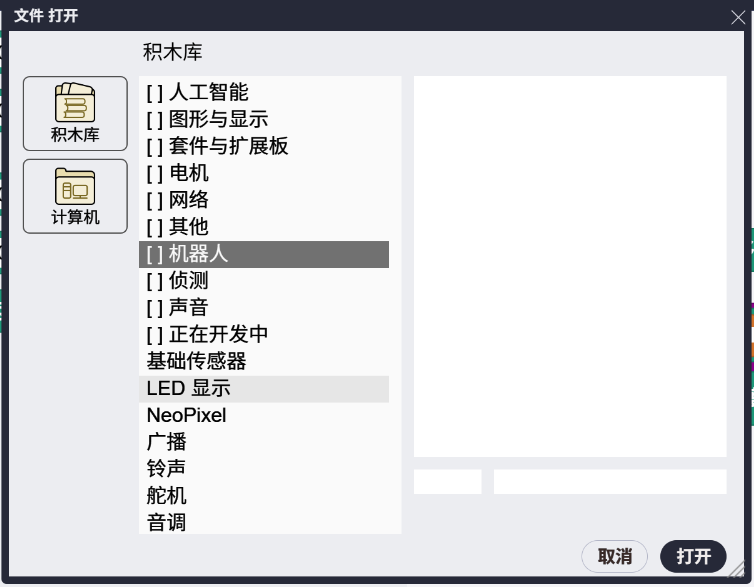
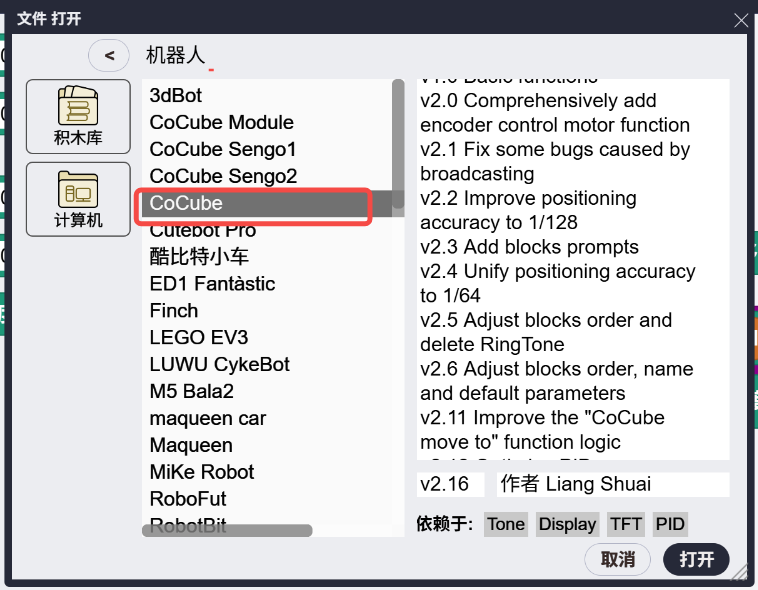
积木库选择
-
基本积木介绍
| 积木样式 | 实现效果 |
|---|---|
 |
 |
 |
清除屏幕图案 |
-
应用案例
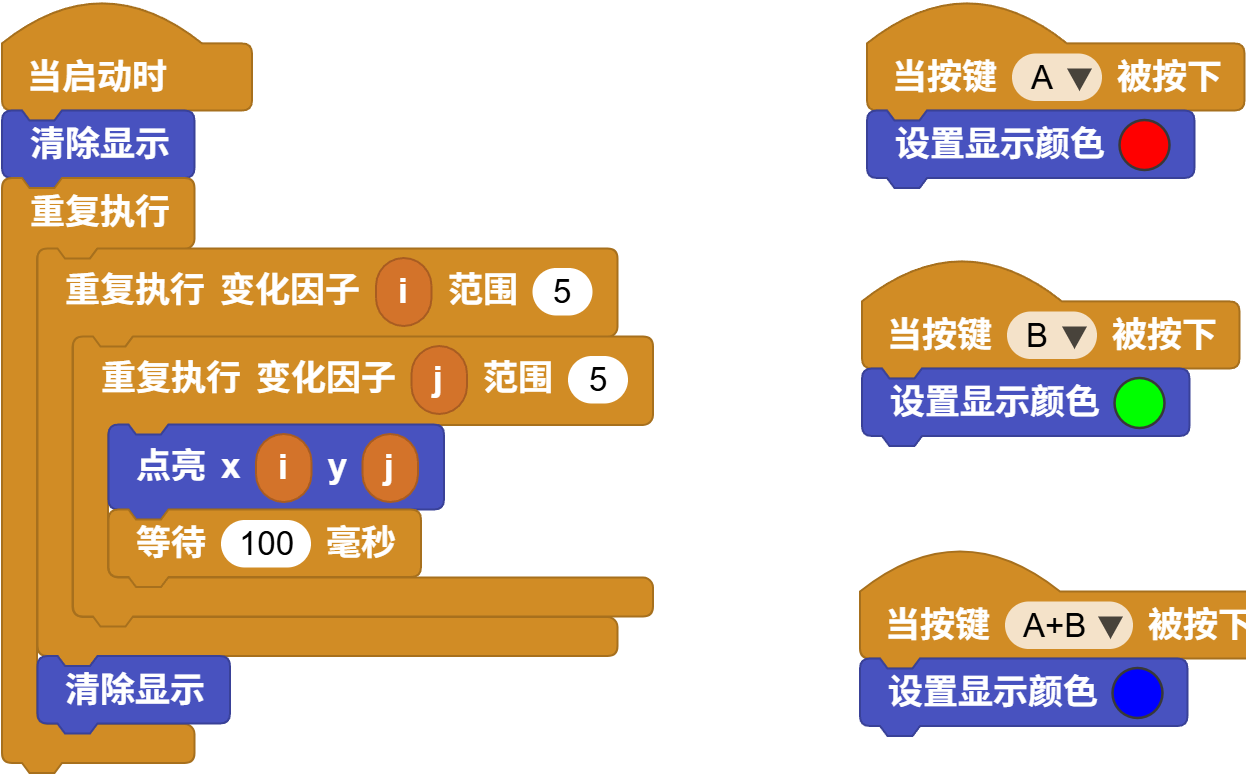 你可以尝试更改等待时间,控制流水灯的快慢;也可以尝试使用“帽子积木”——例如“当按键 A/B 被按下”,为流水灯设置不同的显示颜色。
你可以尝试更改等待时间,控制流水灯的快慢;也可以尝试使用“帽子积木”——例如“当按键 A/B 被按下”,为流水灯设置不同的显示颜色。
¶ 2.2 运动控制
-
积木库选择
-
基本积木介绍
| 积木样式 | 实现效果 |
|---|---|
 |
向【指定方向】以【指定速度】进行【指定时间】运动 |
 |
控制左右轮速度 |
 |
撤掉电机动力,但由于惯性,机器人会继续向前滑行一小段距离 |
 |
让机器人立即停止 |
-
应用案例
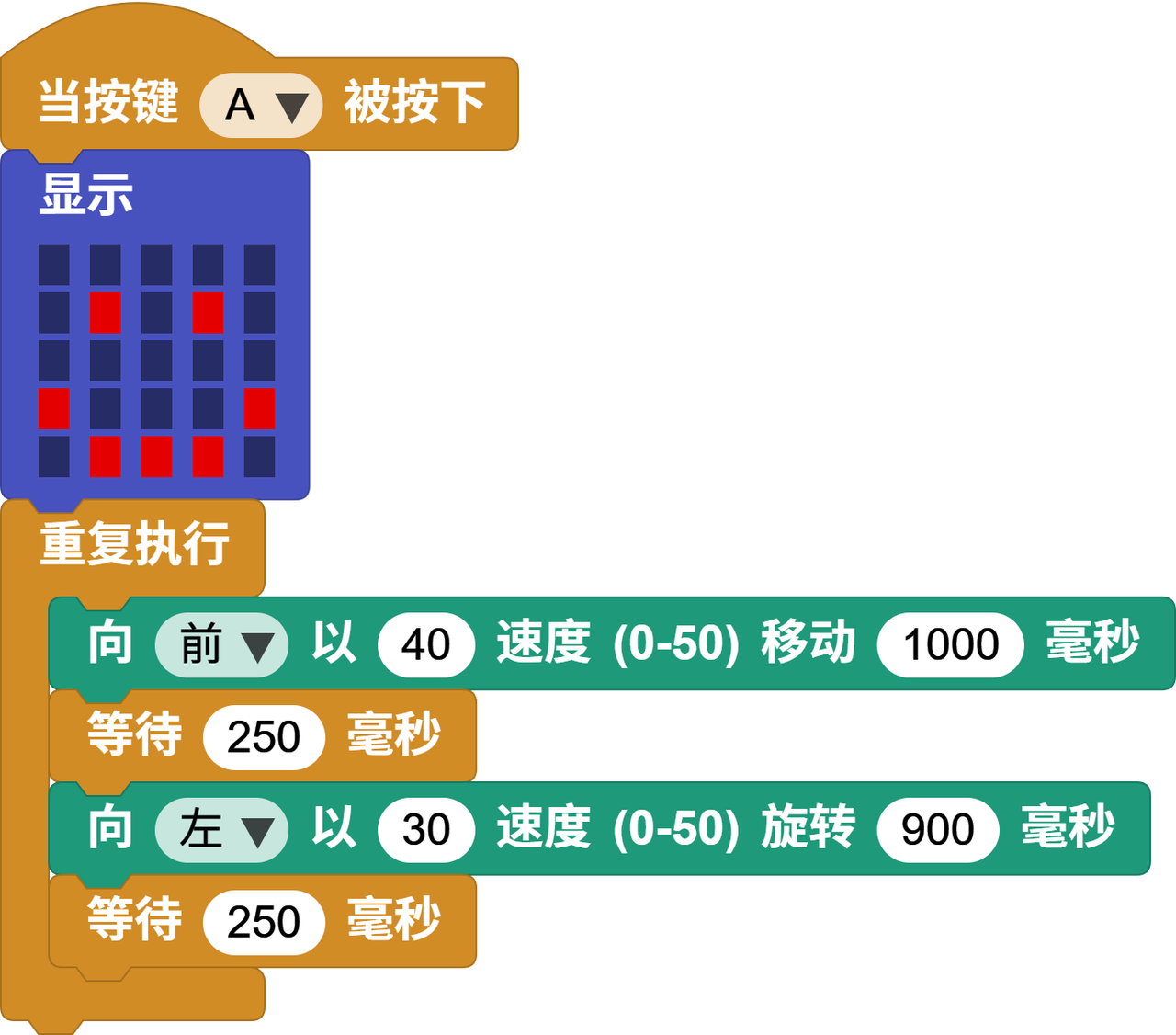 细心的你可能会发现,经过一段时间,AIBox向左转积累的误差将变得越来越大,正方形轨迹也逐渐歪曲。如何才能实现更精准的运动呢?
细心的你可能会发现,经过一段时间,AIBox向左转积累的误差将变得越来越大,正方形轨迹也逐渐歪曲。如何才能实现更精准的运动呢?
¶ 2.3 声音控制
在音乐领域,可以用音符 c、d、e、f、g、a、b 来表示 Do-Re-Mi-Fa-So-La-Ti,升记号(♯)表示将基本音级升高半个音,音阶为 0、1、2……则可以表示低音、中音、高音等。在 MIDI 键盘中,MIDI 音符编号(MIDI Note Number)与音乐中的音高相对应,主要用于数字音乐制作和乐器之间的通信。例如,60 代表钢琴上中央 C,61 代表 C#,62 代表 D……
-
积木库选择
-
基本积木介绍
| 积木样式 | 实现效果 |
|---|---|
 |
机器人使蜂鸣器以所选音调与音阶,持续设定时间发声 |
 |
使蜂鸣器以设定音调发声 |
 |
使蜂鸣器停止发声 |
-
应用案例
- 音符试试看,编写一首《两只老虎》,为了更方便地修改音乐的节奏速度,我们创建一个全局变量 beat,放置到每一个弹奏音符积木中。

- MIDI
试试看,编写一个音乐特效:
- 音符
¶ 2.4 广播控制
-
积木库选择

-
基本积木介绍
| 积木样式 | 实现效果 |
|---|---|
 |
设定相应语句为锚点 |
 |
接受相应语句并执行 |
-
应用案例
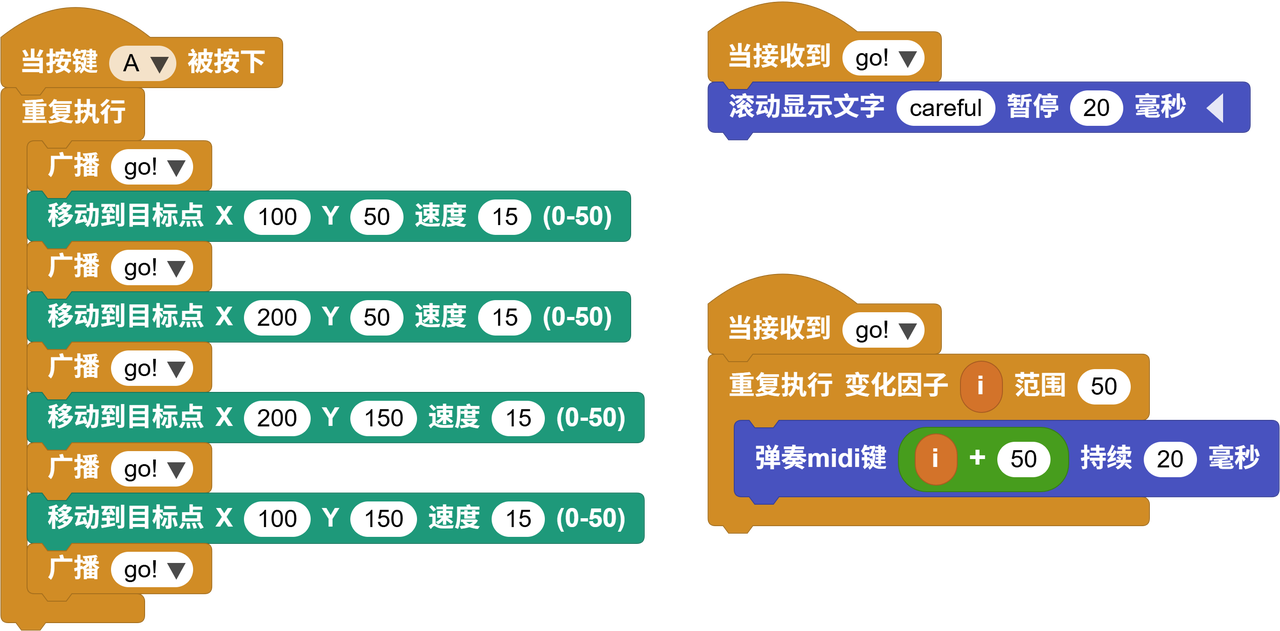 生活中一定遇到过洒水车,当洒水车工作的时候它在喷水的同时会有声音来提醒周边的行人避让,让我们尝试模拟一下洒水车的运行。
生活中一定遇到过洒水车,当洒水车工作的时候它在喷水的同时会有声音来提醒周边的行人避让,让我们尝试模拟一下洒水车的运行。
¶ 2.5 微信小程序控制
微信小程序通过低功耗蓝牙(BLE)与 AIBOX 机器人通信。需要先通过 MicroBlocks IDE 为 AIBOX 机器人加载接口程序,并根据需要进行自定义编程;然后断开 MicroBlocks IDE 与 AIBOX 机器人;最后用微信小程序连接 AIBOX 机器人,就可以实现实时遥控啦!
- 代码写入
程序代码:Microblocks--AIBox案例06 微信小程序摇杆控制
示例程序:
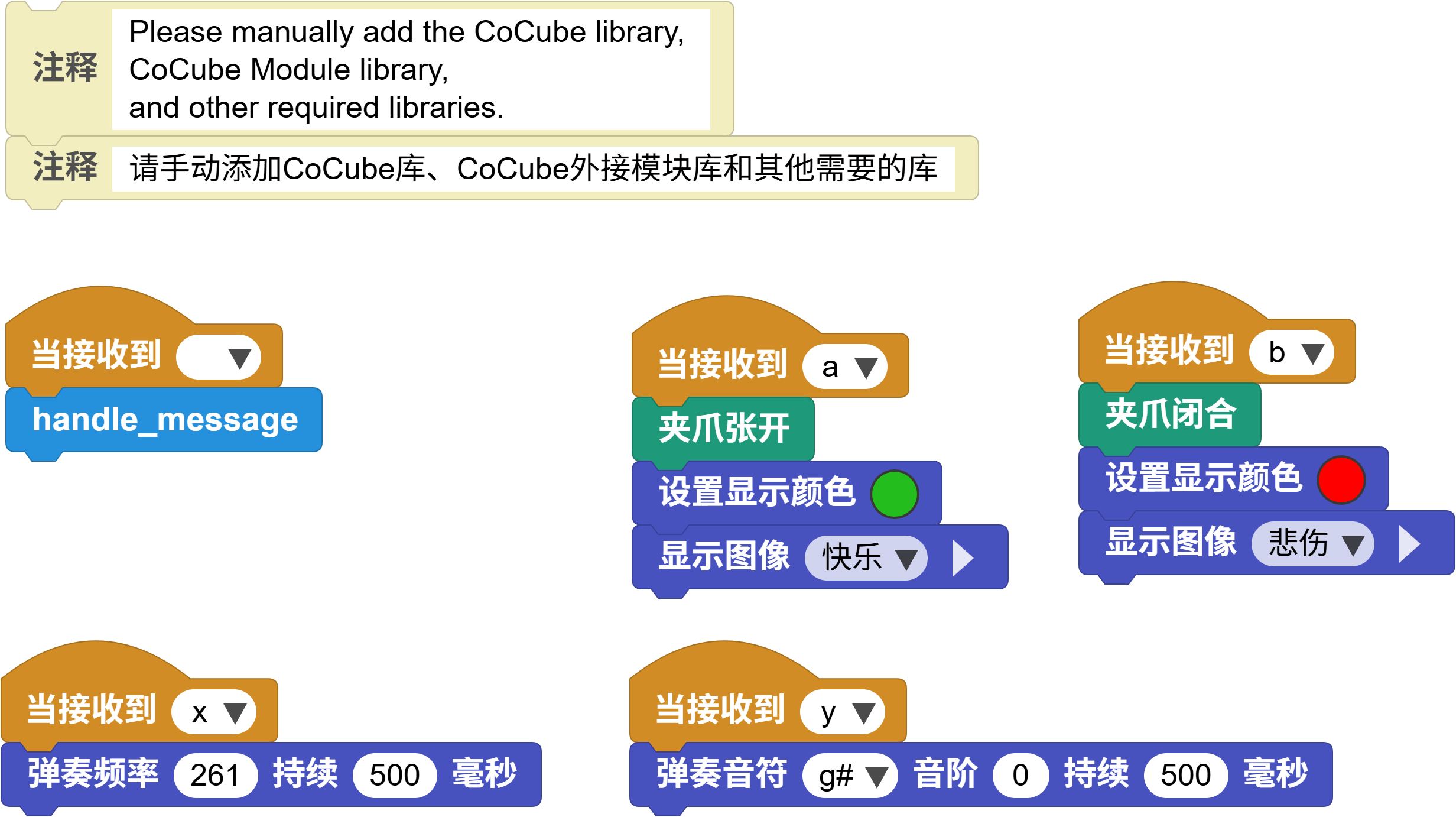
例程使用介绍:
“当接收到 _” 帽子积木用于处理摇杆消息,控制 AIBOX 机器人移动,无需修改
“当接收到 a”、“当接收到 b”、“当接收到 x”、“当接收到 y” 四个帽子积木分别对应微信小程序的A、B、X、Y按键,可根据需要自定义编程。
断开 AIBOX 机器人 和 MicroBlocks IDE 的连接
调试完成后,务必记得断开 AIBOX 机器人和 MicroBlocks IDE 的连接,否则 AIBOX 无法同时被手机连接。
-
与小程序配对
-
打开微信小程序
手机打开微信软件,扫描微信小程序码,打开“CoCube机器人”微信小程序。
-
连接 AIBOX 机器人
- 点击“搜索 CoCube 设备”按钮。当第一次使用时,可能会要求开启蓝牙权限,点击确认。
- 在出现的设备中,找到自己 AIBOX 机器人的蓝牙编号,点击连接。

.jpg)
-
遥控 AIBOX 机器人
左侧虚拟摇杆可控制 AIBOX 机器人底盘运动,杆量大小可调整运动速度,且具备混控功能(例如向左前方滑动,机器人也将向车头左前方转弯)。
右侧 A/B/X/Y 按键分别对应刚刚在 MicroBlocks IDE 中自定义的功能。
-
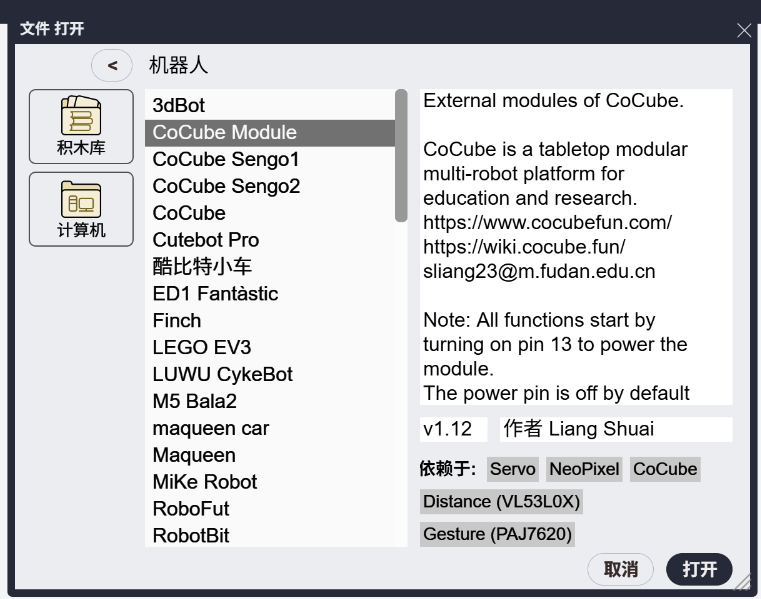
¶ 3 External
¶ 3.1 AImaps定位功能
-
定位垫介绍
我们拿出一张迷宫挑战主题定位地图仔细观察: 地图左上角坐标为 (0,0),右下角坐标为 (300,200),X轴从左到右(0~300),Y轴从上到下(0~200)。 机器人朝 Y 轴正方向时为 0 度,机器人面朝 Y 轴负方向时为180度,逆时针旋转角度增加。 地图上每隔50单位印有虚线,可以辅助快速定位坐标位置。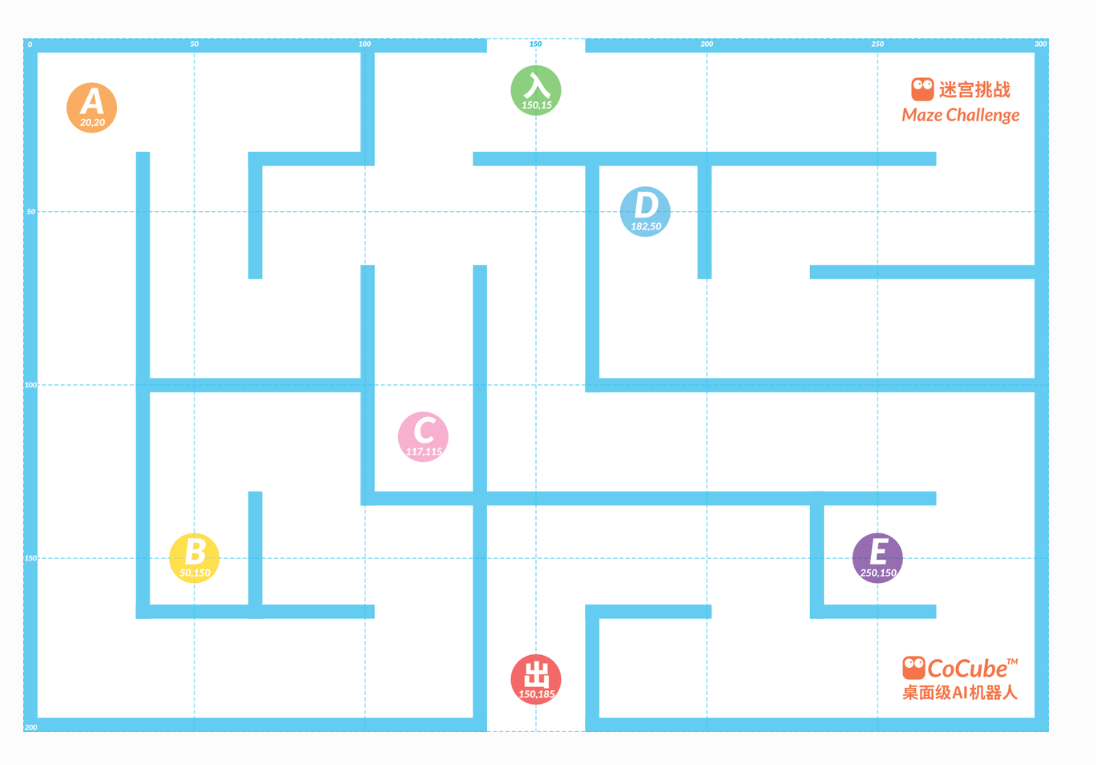
-
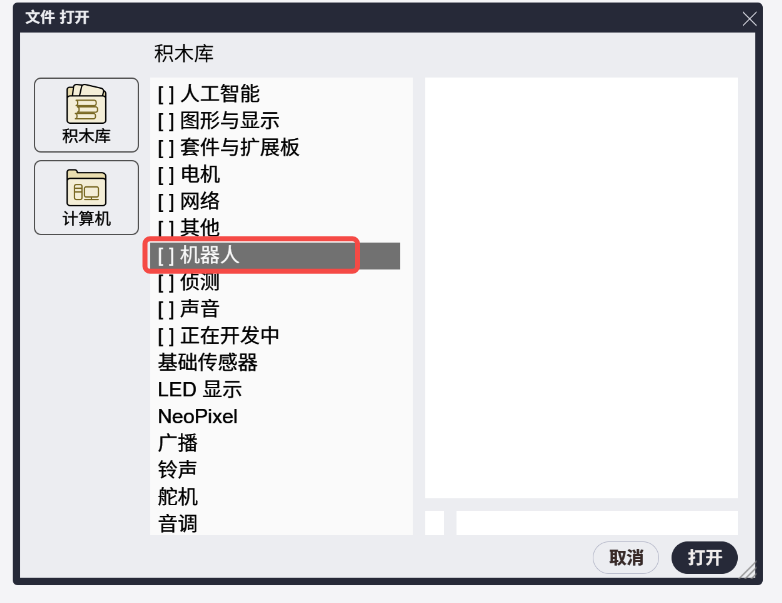
积木库选择

-
基本积木介绍
定位积木指令需要在定位地图上使用
| 积木样式 | 实现效果 |
|---|---|
 |
 在编程界面输出所需结果 |
 |
 在绘图界面输出结果 |
 |
读取机器人在定位垫上的 X 坐标 |
 |
读取机器人在定位垫上的 Y 坐标 |
 |
读取机器人在定位垫上与 Y 轴正方向的夹角 |
- 应用案例
| 例程 | 例程描述 |
|---|---|

|
机器人绘制正方形轨迹 |

|
使用定位垫的坐标反馈功能与定点移动功能,从迷宫的入口走向出口。 |
¶ 3.2 夹爪模块
-
积木库选择
-
基本积木介绍
积木样式 实现效果 
电机驱动夹爪张开 
电机驱动夹爪闭合 
在“夹爪角度”模块里填入(0到70)的角度数字,夹爪转向对应角度 
电机停止 -
应用案例
例程 例程描述 实现效果 
将小足球从迷宫地图的C点搬运到E点。 
参考例程:
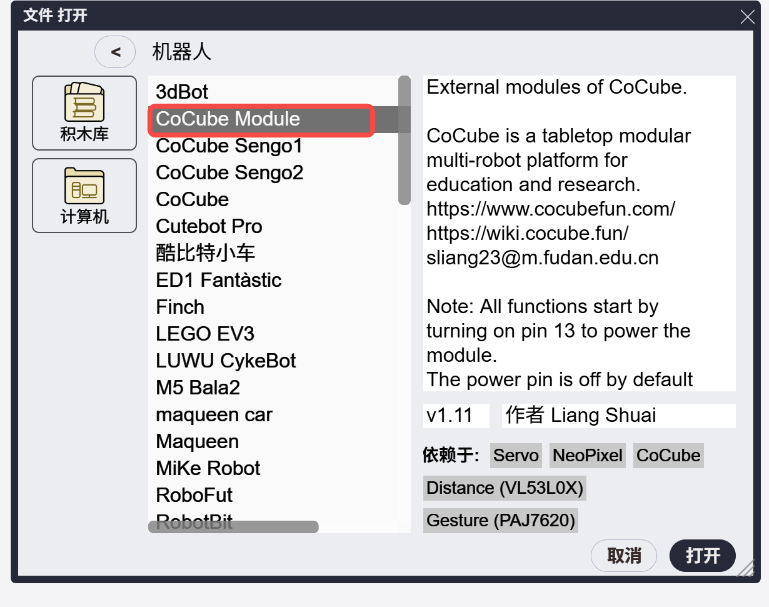
¶ 3.3 NeoPixel显示模块
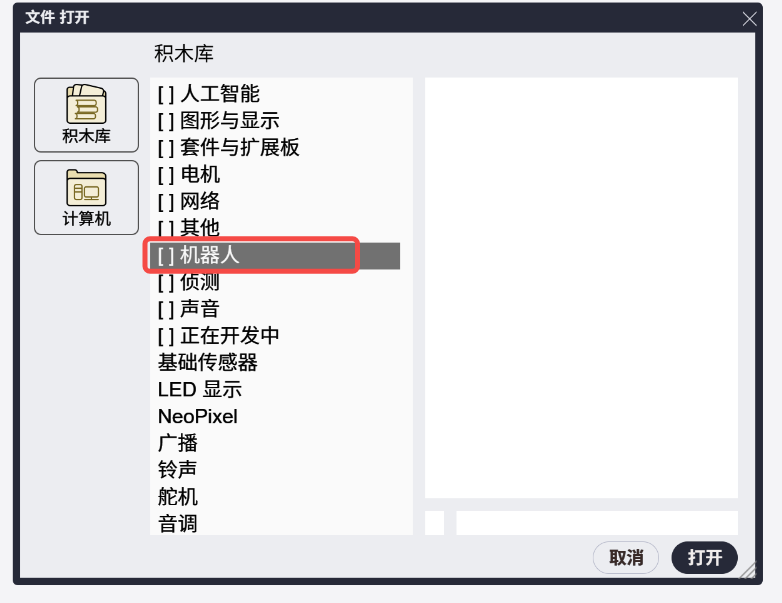
-
积木库选择
-
基本积木介绍
积木样式 实现效果 
开始灯板模块 
点亮所有 NeoPixels 
清除显示 
将现有的灯珠颜色整体移位 -
应用案例
积木样式 实现效果 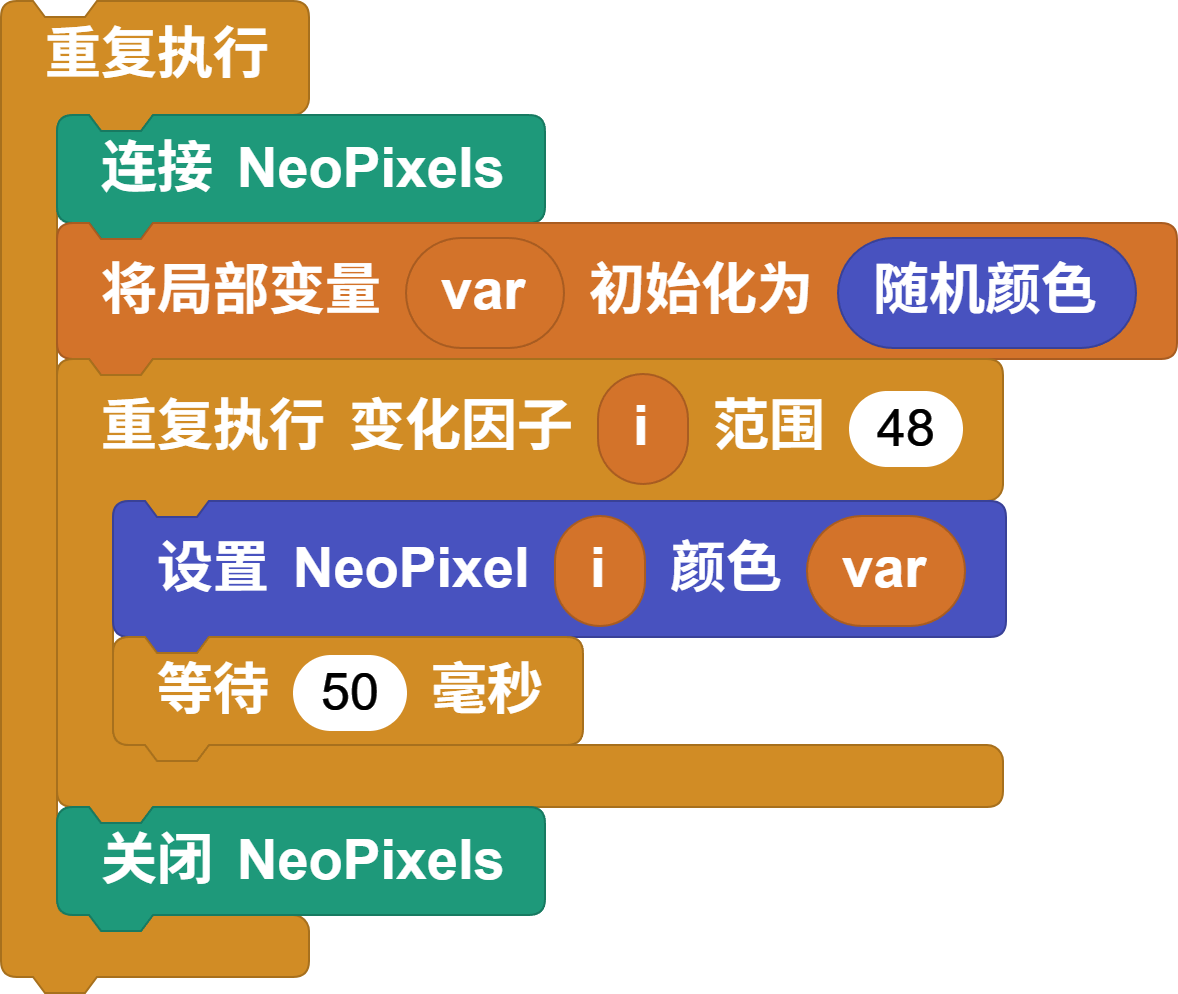
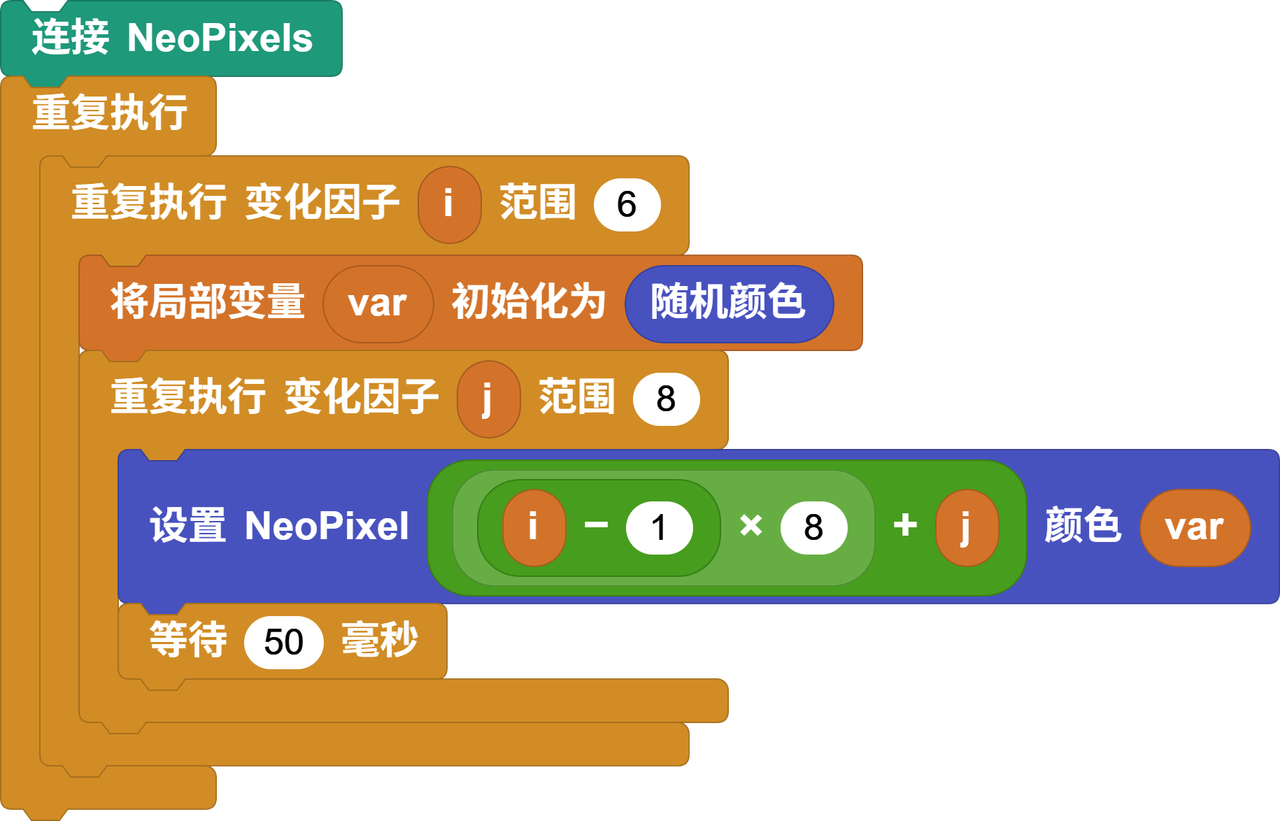



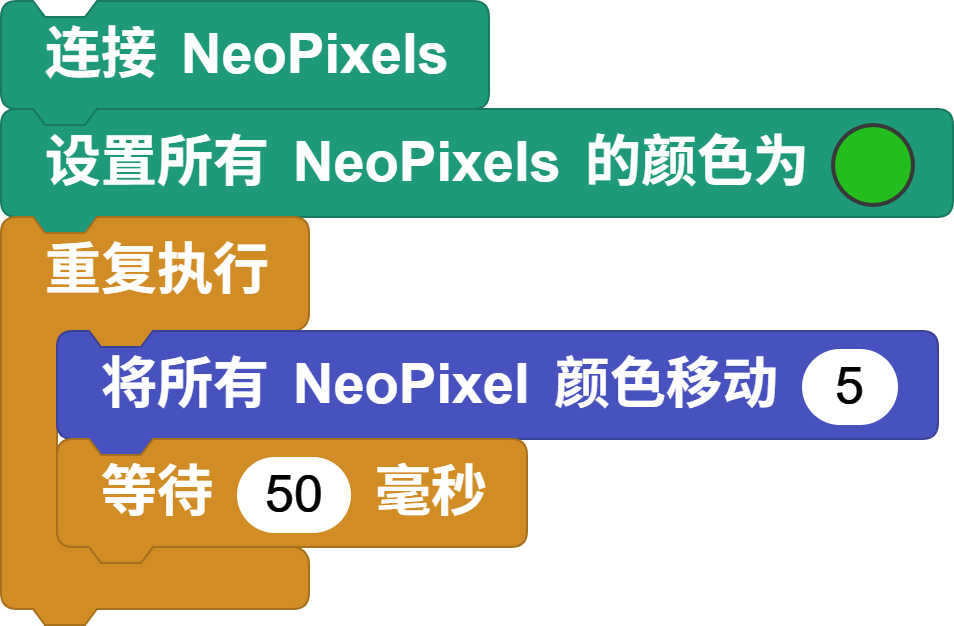
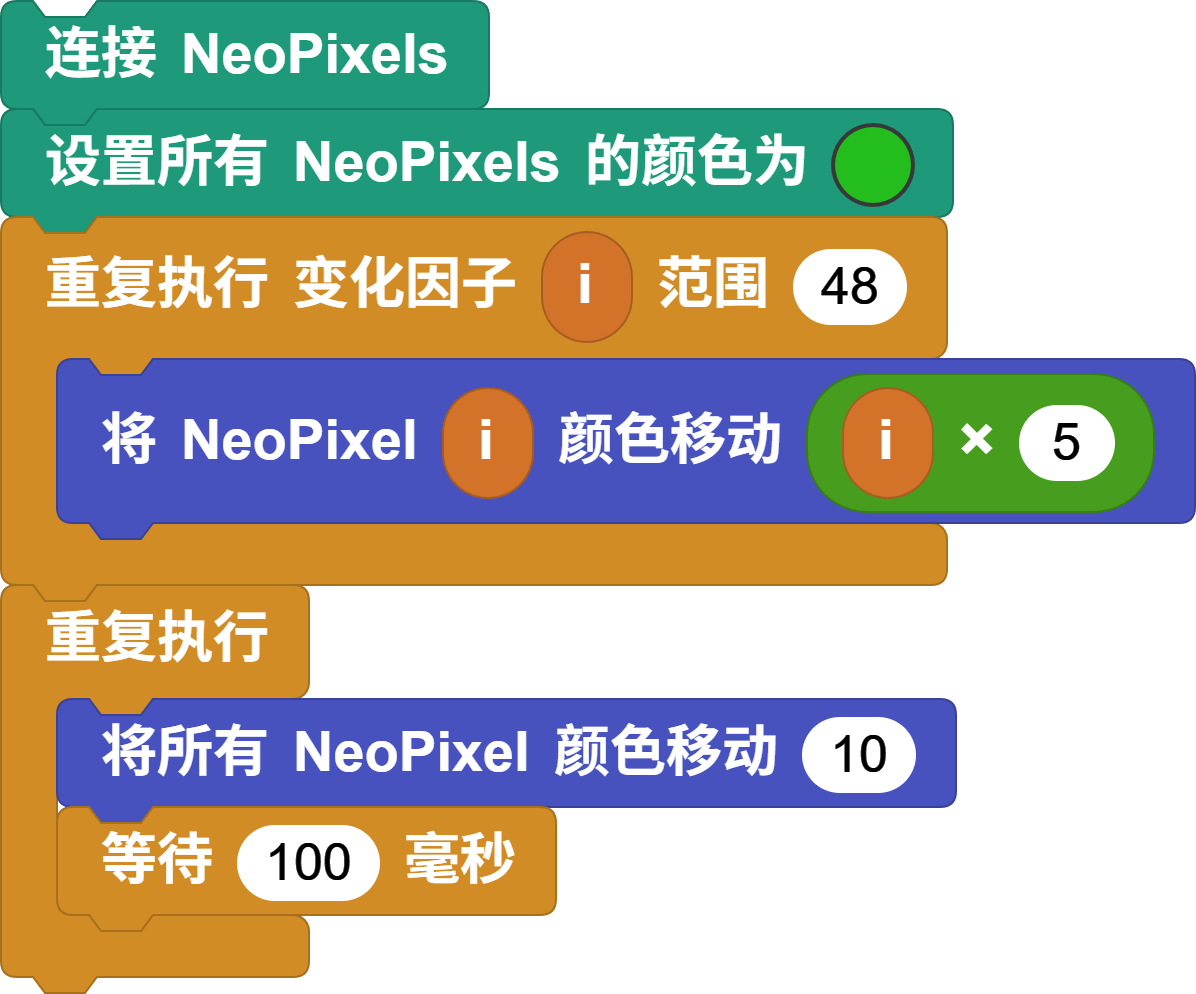

参考例程:
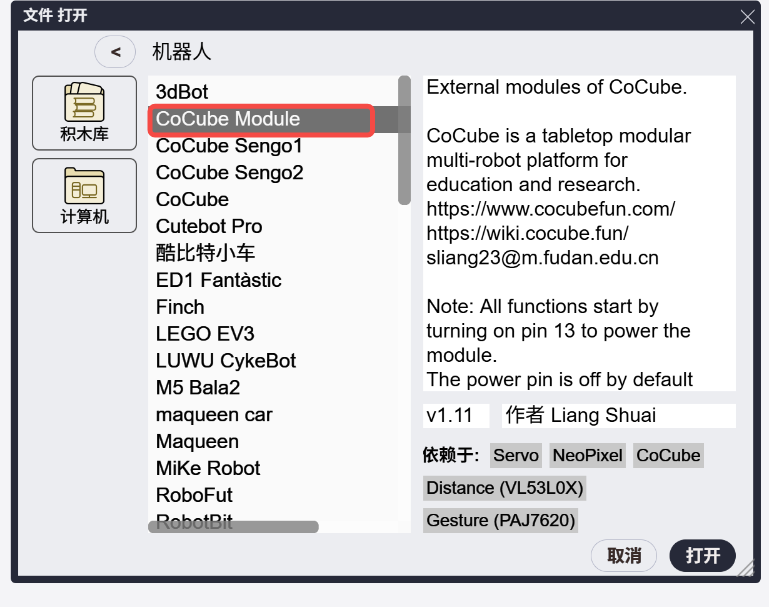
¶ 3.4 TOF激光测距模块
-
积木库选择
-
基本积木介绍
积木样式 实现效果 
拖拽出“ToF 已连接”积木块,拖拽到工作区,并单击运行。该积木可判断机器人是否已经连接到 ToF 激光测距模块。 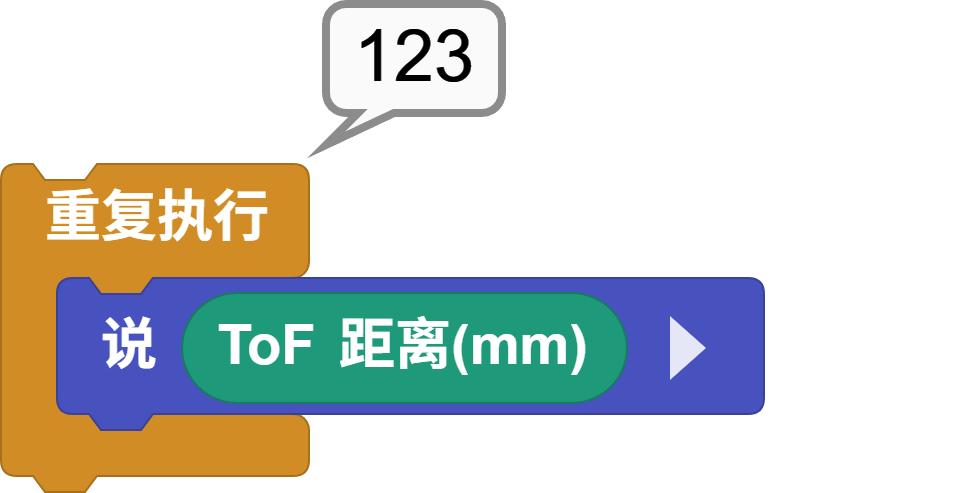
拖拽出“ToF 距离(mm)”积木,单击运行,即可返回 ToF 激光测距传感器到前方障碍物的距离。 -
应用案例
例程 例程描述 实现效果 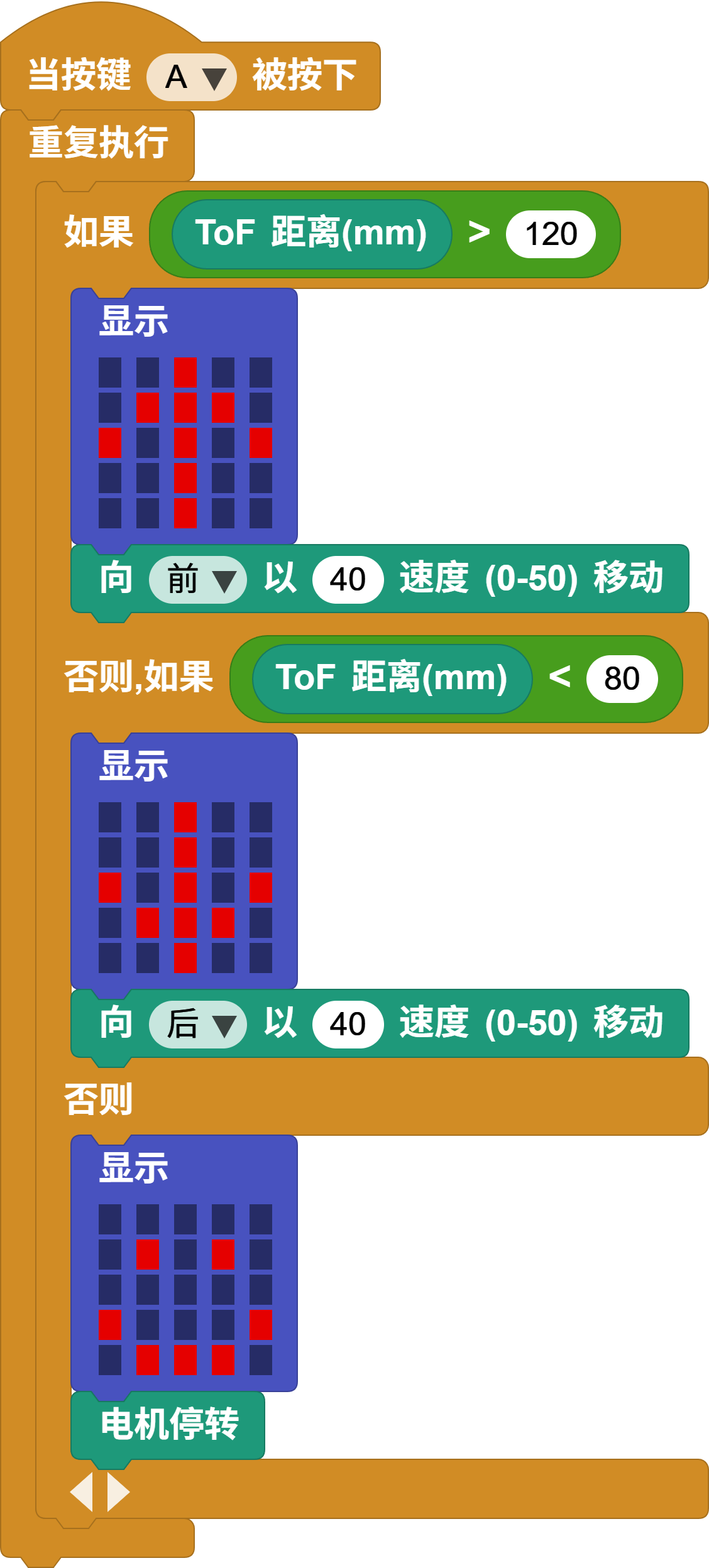
与前方障碍足够远的话,就向前移动;与障碍距离足够近时,就向后倒车。 
参考例程:
¶ 3.5 ASR语音识别模块
-
积木库选择
-
基本积木介绍
-
连接设备
- 用有线/无线把 MicroBlocks IDE 连上 AIBOX 机器人;把 ASR 模块插到机器人上。
- 注意环境要相对安静,发音清晰、语速适中更容易识别。
-
基本积木
积木样式 实现效果 
获取指令 ID 
语音播报指令 -
试试识别与播报
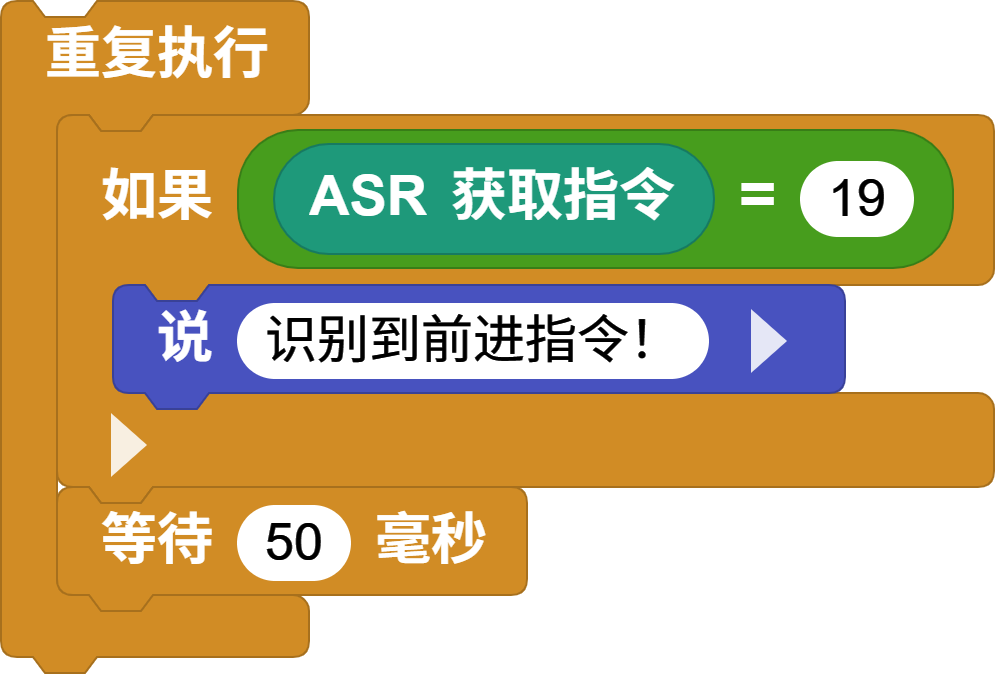
- 重复读取“ASR 获取指令”。
- 再根据 ID 让机器人行动(比如前进/后退/停车)。
- 先用唤醒词开场(如“你好小智”),再说命令词,唤醒成功后你可以看到唤醒指示灯亮了。
- 当你说出命令词时,ASR 模块会回答,同时你可以在积木中拿到 ID。
-
-
指令-ID 映射表
点击展开/折叠指令-ID 映射表
ID 命令词 功能类型 播报语句 1 学习的唤醒词 唤醒词 我在 2 你好小智 唤醒词 我在 3 小智你好 唤醒词 我在 4 第一个自定义 命令词 好的 5 第二个自定义 命令词 好的 6 第三个自定义 命令词 好的 7 第四个自定义 命令词 好的 8 第五个自定义 命令词 好的 9 第六个自定义 命令词 好的 10 第七个自定义 命令词 好的 11 第八个自定义 命令词 好的 12 第九个自定义 命令词 好的 13 第十个自定义 命令词 好的 14 第十一自定义 命令词 好的 15 第十二自定义 命令词 好的 16 第十三自定义 命令词 好的 17 第十四自定义 命令词 好的 18 第十五自定义 命令词 好的 19 前进 命令词 开始前进 20 后退 命令词 开始后退 21 停车 命令词 已停车 22 左转九十度 命令词 左转九十度 23 左转四十五度 命令词 左转四十五度 24 左转三十度 命令词 左转三十度 25 右转九十度 命令词 右转九十度 26 右转四十五度 命令词 右转四十五度 27 右转三十度 命令词 右转三十度 28 加速一档 命令词 已加速 29 减速一档 命令词 已减速 30 打开车灯 命令词 车灯已打开 31 关闭车灯 命令词 车灯已关闭 32 巡线模式 命令词 已进入+巡线模式 33 追光模式 命令词 已进入+追光模式 34 蓝牙控制模式 命令词 已进入+蓝牙控制模式 35 避障模式 命令词 已进入+避障模式 36 人脸识别 命令词 已进入+人脸识别模式 37 物体追踪 命令词 已进入+物体追踪模式 38 物体识别 命令词 已进入+物体识别模式 39 巡线追踪 命令词 已进入+巡线追踪模式 40 颜色识别 命令词 已进入+颜色识别模块 41 标签识别 命令词 已进入+标签识别模式 42 物体分类 命令词 已进入+物体分类模式 43 二维码识别 命令词 已进入+二维码识别模式 44 清除屏幕 命令词 已清除屏幕 45 学习一次 命令词 开始学习 46 遗忘 命令词 已遗忘 47 加载模型 命令词 模型加载中 48 保存模型 命令词 模型已保存 49 拍照并保存 命令词 拍照完成 50 保存并返回 命令词 已保存 51 显示数字零 命令词 好的 52 显示数字一 命令词 好的 53 显示数字二 命令词 好的 54 显示数字三 命令词 好的 55 显示数字四 命令词 好的 56 显示数字五 命令词 好的 57 显示数字六 命令词 好的 58 显示数字七 命令词 好的 59 显示数字八 命令词 好的 60 显示数字九 命令词 好的 61 显示笑脸 命令词 好的 62 显示哭脸 命令词 好的 63 显示爱心 命令词 好的 64 读取当前位置 命令词 读取中 65 读取环境光 命令词 读取中 66 读取指南针 命令词 读取中 67 读取温度 命令词 读取中 68 读取加速度 命令词 读取中 69 读取声音强度 命令词 读取中 70 读取按键A 命令词 读取中 71 读取按键B 命令词 读取中 72 打开摄像头 命令词 摄像头已打开 73 关闭摄像头 命令词 摄像头已关闭 74 打开风扇 命令词 风扇已打开 75 关闭风扇 命令词 风扇已关闭 76 风速一档 命令词 一档启动 77 风速二档 命令词 二档启动 78 风速三档 命令词 三档启动 79 开启摇头 命令词 开始摇头 80 停止摇头 命令词 停止摇头 81 归位 命令词 正在归位 82 打开夹爪 命令词 夹爪已打开 83 关闭夹爪 命令词 夹爪已关闭 84 打开蜂鸣器 命令词 蜂鸣器已打开 85 关闭蜂鸣器 命令词 蜂鸣器已关闭 86 打开喇叭 命令词 喇叭已打开 87 关闭喇叭 命令词 喇叭已关闭 88 播放音乐 命令词 开始播放 89 停止播放 命令词 停止播放 90 上一曲 命令词 切换上一曲 91 下一曲 命令词 切换下一曲 92 单曲循环 命令词 单曲循环 93 列表循环 命令词 列表循环 94 随机播放 命令词 随机播放 95 增大音量 增大音量 音量已增大 96 减小音量 减小音量 音量已减小 97 最大音量 最大音量 音量已最大 98 最小音量 最小音量 音量已最小 99 中等音量 中等音量 中等音量 100 开播报 开播报 开启播报功能 101 关播报 关播报 关闭播报功能 102 打开灯光 命令词 灯光已开 103 关闭灯光 命令词 灯光已关 104 调高亮度 命令词 亮度调高 105 调低亮度 命令词 亮度调低 106 最高亮度 命令词 最高亮度 107 最低亮度 命令词 最低亮度 108 调高色温 命令词 色温调高 109 调低色温 命令词 色温调低 110 日光模式 命令词 日光模式 111 月光模式 命令词 月光模式 112 设置为红色 命令词 已设红色 113 设置为橙色 命令词 已设橙色 114 设置为黄色 命令词 已设黄色 115 设置为绿色 命令词 已设绿色 116 设置为青色 命令词 已设青色 117 设置为蓝色 命令词 已设蓝色 118 设置为紫色 命令词 已设紫色 119 设置为白色 命令词 已设白色 120 打开空调 命令词 空调已开 121 关闭空调 命令词 空调已关 124 制冷模式 命令词 制冷模式 125 制热模式 命令词 制热模式 126 自动模式 命令词 自动模式 127 除湿模式 命令词 除湿模式 128 通风模式 命令词 通风模式 129 打开上下扫风 命令词 上下扫风 130 关闭上下扫风 命令词 停止扫风 131 打开左右扫风 命令词 左右扫风 132 关闭左右扫风 命令词 停止扫风 133 打开窗户 命令词 窗户已开 134 关闭窗户 命令词 窗户已关 135 打开窗帘 命令词 窗帘已开 136 关闭窗帘 命令词 窗帘已关 137 开门 命令词 门已打开 138 关门 命令词 门已关闭 -
应用案例
-
学习唤醒词
学习唤醒词就是让机器人从"待机"变成"聆听"的开关词。
操作步骤:- 用默认唤醒词(如"你好小智")唤醒机器人。
- 说"学习唤醒词"。
- 按提示说出你想要的唤醒词(比如"你好,AIBOX")。
- 完成后就能用新唤醒词啦!
💡 小贴士: 每次学习前记得先删除旧的唤醒词,保持环境安静,发音清晰。
-
学习命令词
学习命令词就是让机器人执行动作的指令。
操作步骤:- 用唤醒词唤醒机器人。
- 说"学习命令词"。
- 按提示说第一条命令(比如"打开红灯")。
- 继续学习第二条、第三条……或说"退出学习"结束。
- 学习成功后会自动生成 ID(从 4 开始),用这个 ID 编程控制即可。
-
删除命令词/唤醒词
不想要之前学的词了?
操作步骤:- 用唤醒词唤醒机器人。
- 说"我要删除"。
- 根据提示选择:
- "删除命令词" → 删除学过的命令词。
- "删除唤醒词" → 删除学过的唤醒词。
- "全部删除" → 一键清空。
- "退出删除" → 取消操作。
-
¶ 3.6 Dlight光强传感模块
-
积木库选择
-
基本积木介绍
积木样式 实现效果 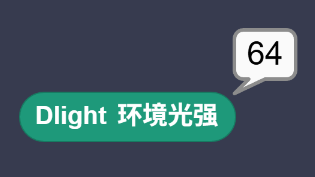
拖拽出“Dlight 环境光强”积木块,拖拽到工作区,并单击运行。该积木可判断机器人周围的环境光强。 -
应用案例
例程 例程描述 实现效果 
环境足够暗时,机器人将开启灯光 
参考例程:
¶ 3.7 AI智能摄像头
-
积木库选择

-
基本积木介绍
积木样式 实现效果 使用示例 
一个可选参数是 i2c 地址。默认为 96。(0x60) 
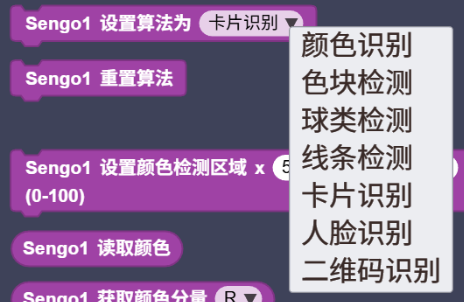
根据需要设置模式 
重置传感器算法为初始情况 
设置检测色块高度与宽度 
读取色块返回值 
读取色块不同变量 
读取线条不同变量 
球类检测 
读取球的不同变量 
读取卡片类型 
读取卡片的不同变量 
记录人脸ID 
删除人脸ID 
获取人脸ID 
读取人脸的不同变量 -
应用案例
¶ 3. 应用案例
积木样式 实现效果 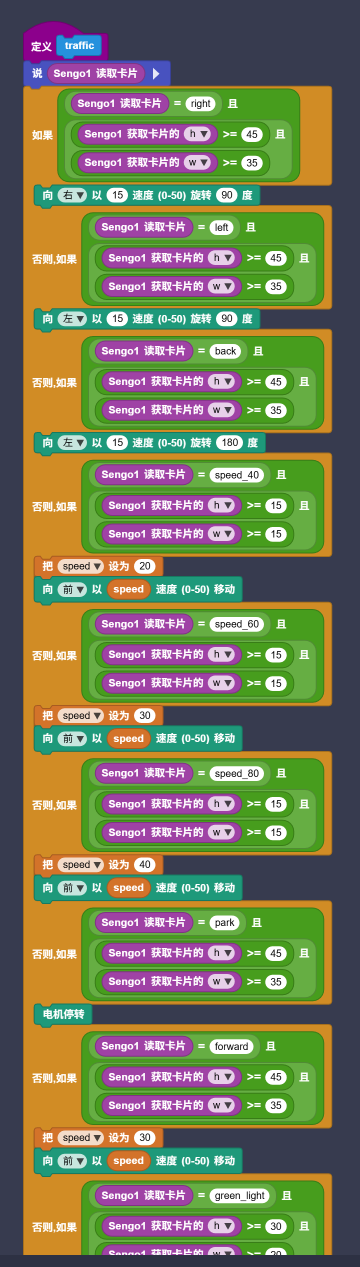
智慧交通:Sengo1的卡片模式支持5张卡片,分别为:Forward、Turn around、Left、Right、Park。AI Box 1当中也仅附送了5张卡片贴纸和5个乐高积木 
自动巡线 参考例程:
* AI视觉感知模块案例参考例程-智慧交通
* AI视觉感知模块案例参考例程-自动巡线¶ 2.4 集群
¶ 2.4.1 快速入门
- 基站介绍
- 基站安装
- 平台介绍
Snap
下载离线版本:
snap!_offline_1.0.1.exe - AIbox连接配对
-
打开基站
- 找到 Type-C 线,将它插入基站的 Type-C 电源接口。
- 耐心等待约1分钟,让基站完全启动。
- 在电脑上连接基站的 WiFi 网络(一般是
COCUBEXXXX),或者用网线连接基站。
💡 小提示: 如果使用网线,请确保插入基站的 LAN 口(通常标有"LAN"字样)。

-
AIbox连接WiFi
-
连接AIBOX机器人:
如果你的机器人还没有连接过 WiFi,需要先在 MicroBlocks 中设置。如果已经连接过,可以直接跳过这一步。用数据线或无线方式连接 MicroBlocks 编程环境和你的 AIBOX 机器人。 -
设置WiFi连接:
将下面的程序拖到 MicroBlocks 工作区,然后按照你的实际情况修改:
集群连接程式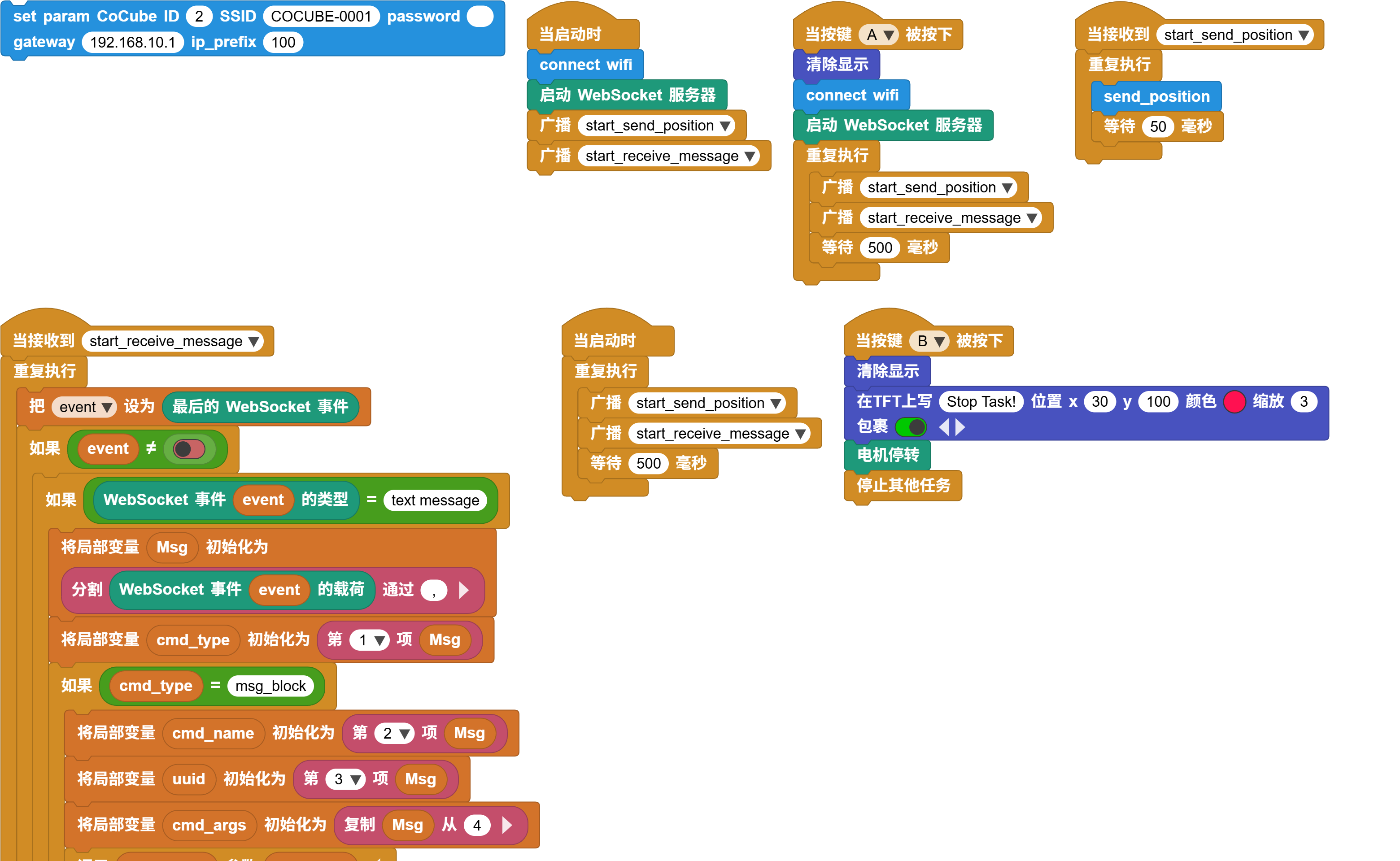
- 机器人 ID(给每个机器人设置一个编号,比如1号、2号)
- WiFi 名称(你要连接的网络名)
- 路由器地址(默认是
192.168.10.1)
设置好后,点击这个积木块,再点击右上角的▶️开始按钮。
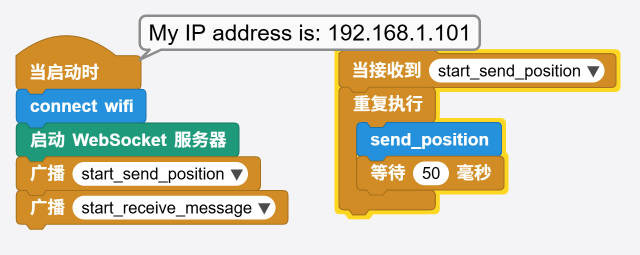
如果你看到积木显示了机器人的 IP 地址(就像下图这样)恭喜你连接成功了!如果要连接更多 AIBOX 机器人,请重复执行上述的操作。
-
-
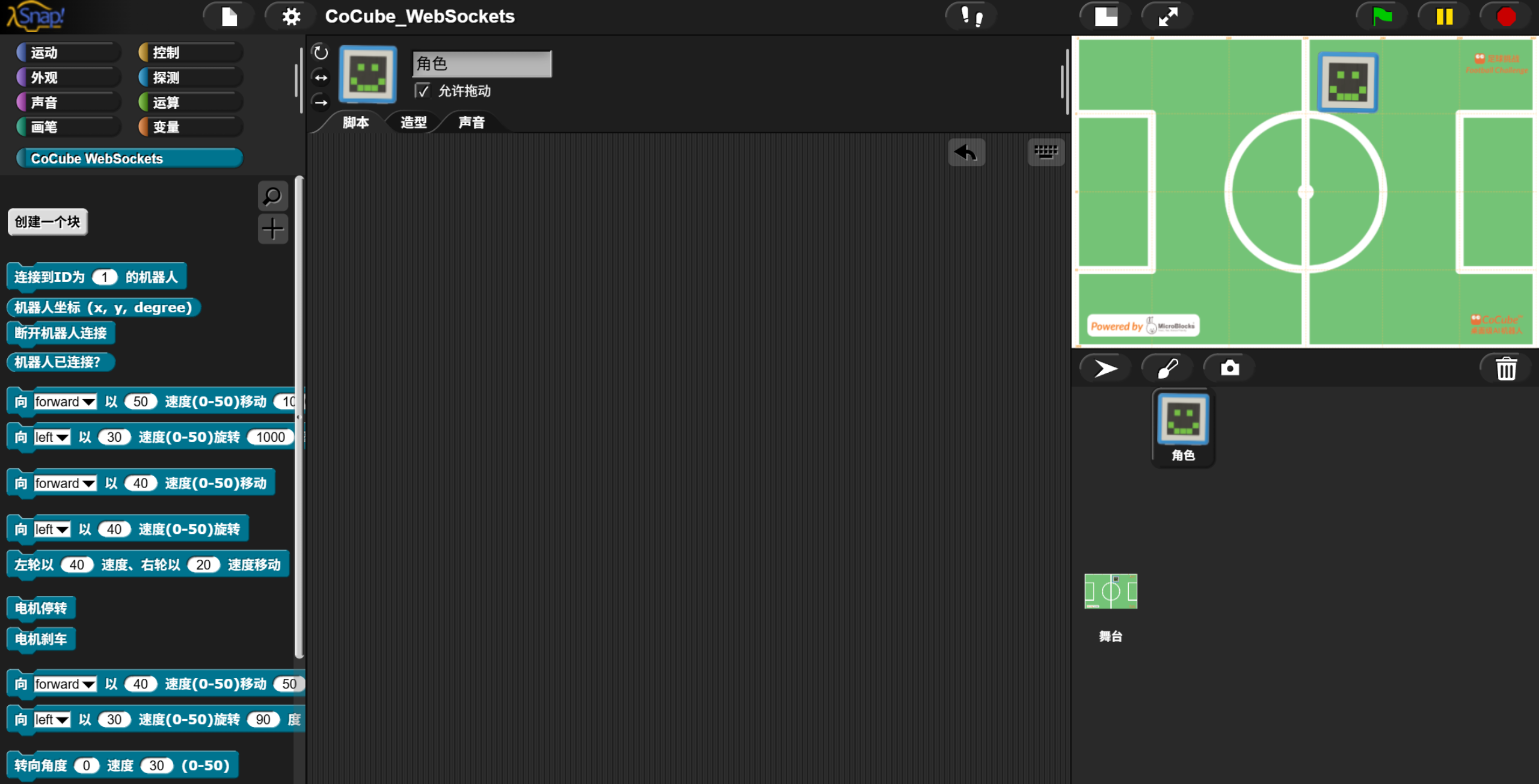
用Snap控制你的机器人
-
下载示例程序: 点击 示例程式1
提示: 如果打开的 Snap 网站默认是 https://snap.codelab.club/snap.html,请手动删除地址中的 "s"(改为 http)后按回车。
-
导入到Snap: 打开 Snap 网站,将
cocube_snap_example1.xml文件拖到窗口中。 -
连接机器人:
- 输入刚才设置的机器人 ID,连接你的第一个机器人。
- 如果机器人出现以下报错,请将snap的访问不安全内容设置为允许
* 想控制更多机器人?点击右边的"添加一个海龟角色"按钮。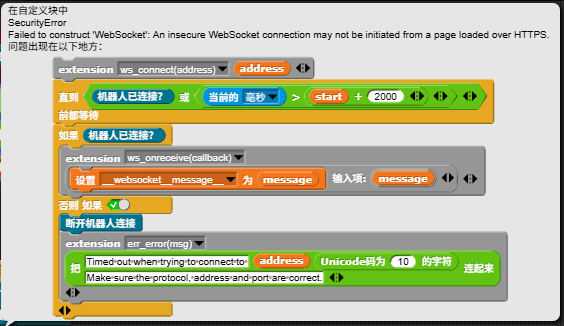
⚠️ 重要提醒: 千万不要用"复制"或"克隆"功能,每个机器人都需要独立的角色。
-
设置舞台:
你可以点击右下角的舞台,然后点击背景按钮,拖入你喜欢的舞台图片!设置后记得重新点击你要控制的角色进行编程。

-
开始编程控制:
机器人连接成功后,你就可以用左边的积木块自由组合程序啦!让机器人前进、后退、转弯,甚至跳舞都可以!
-
-
¶ 2.4.2 应用案例
- 导入控制程序
- 下载示例程序: 点击 下载示例程序 1
- 导入到Snap: 打开 Snap网站,将
cocube_snap_example1.xml文件拖到窗口中。 - 查看机器人角色: 你会看到文件已经创建好了带有编号的四个机器人角色!
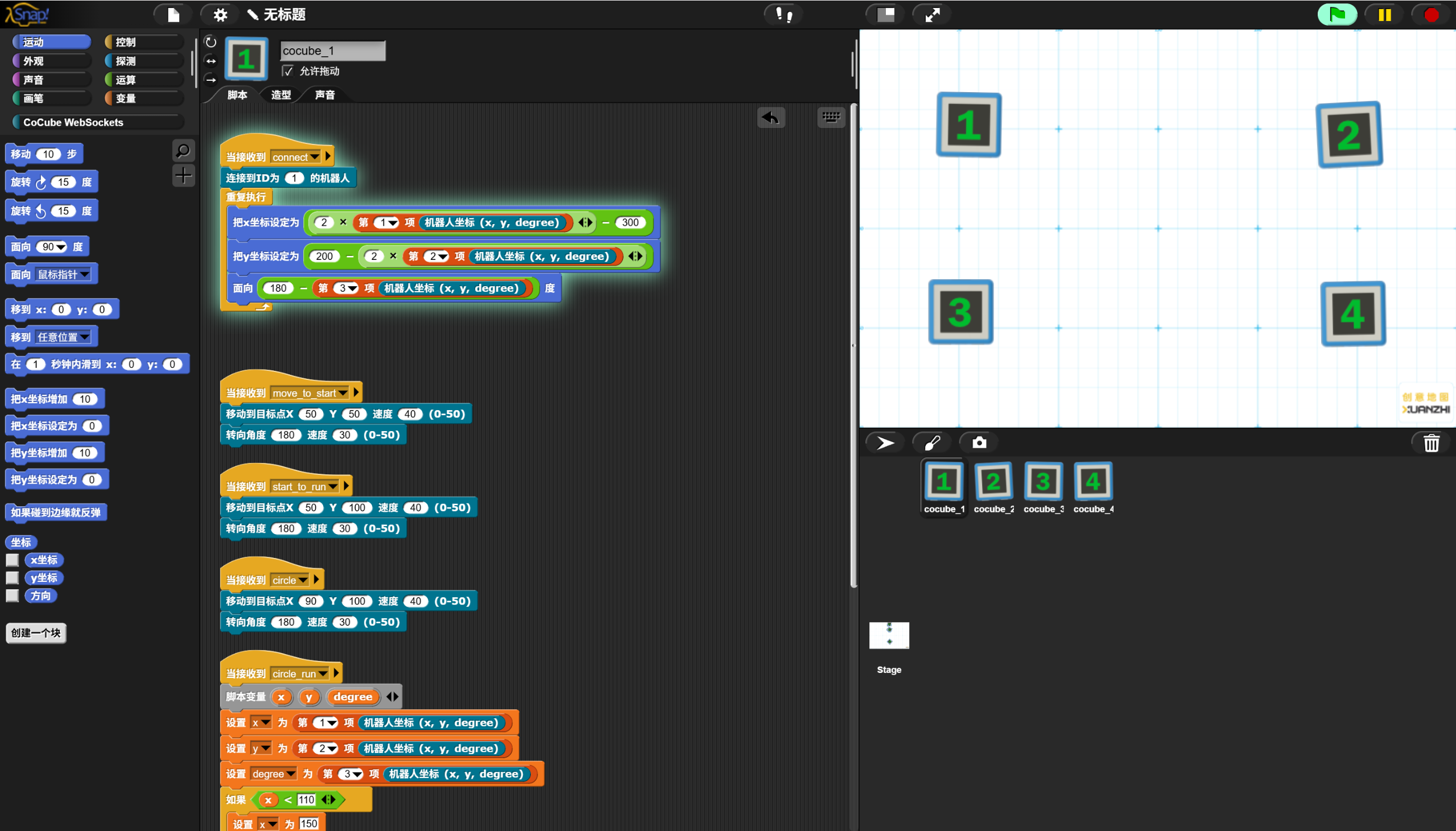
- 开始执行编队控制
-
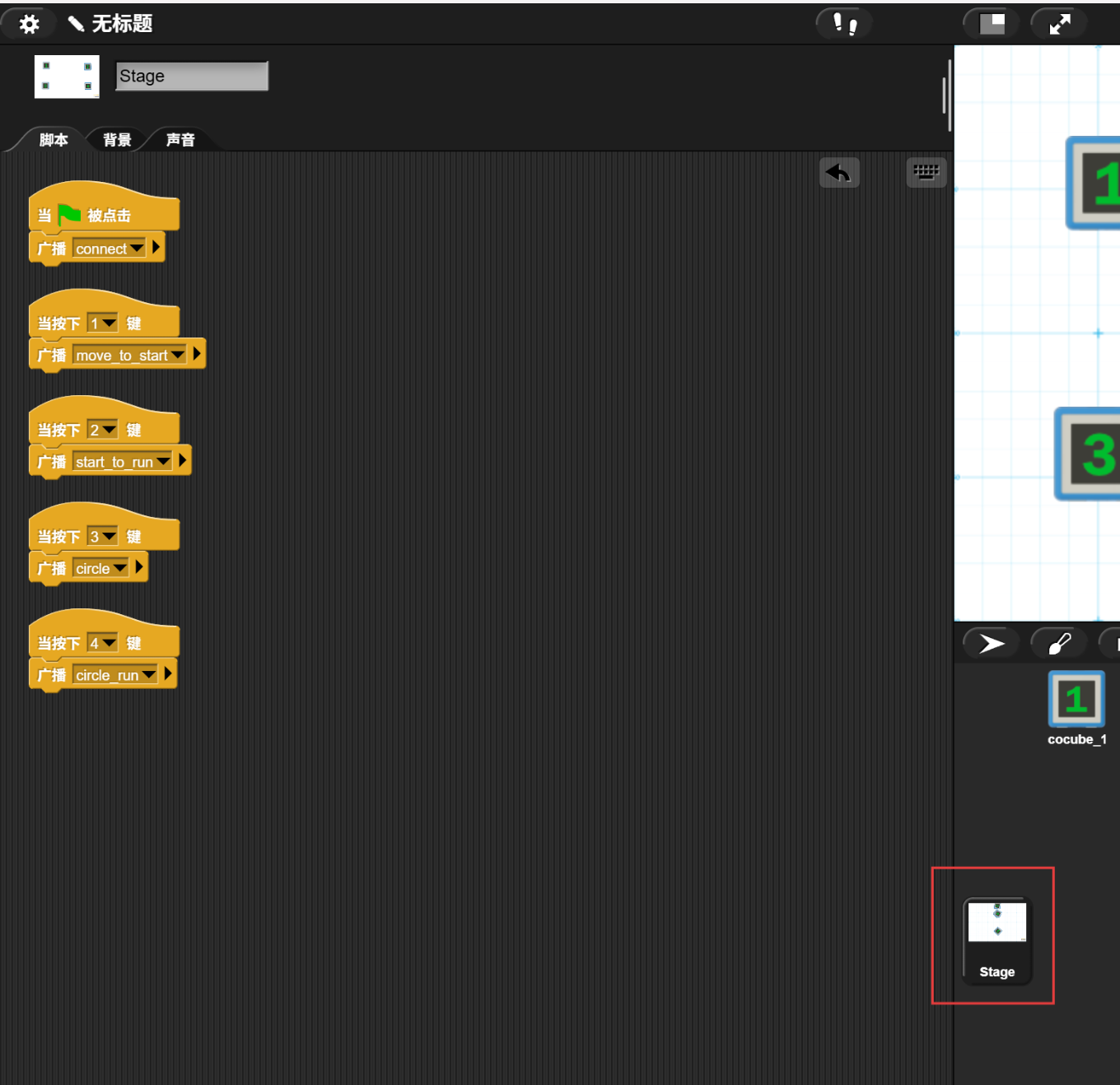
了解控制按键: 点击右侧的舞台,可以看到预设的控制指令:
- 点击小绿旗:连接四个机器人
- 按键盘"1":移动到起始点
- 按键盘"2":开始排成直线
- 按键盘"3":排列成圆形
- 按键盘"4":圆形环绕运动
-
开始控制:
- 首先点击右上角小绿旗按钮连接机器人。
- 连接成功后,Snap 右上角会显示机器人实时位置,移动实体机器人会看到位置同步变化!
* 然后按下键盘数字键"1-4"来执行不同的编队动作,
-
自定义编程:
想要修改动作?点击任意机器人角色,然后拖动左边的积木块来创建你自己的编队程序! -
600x600地图探索挑战
通过上面的例子,你已经掌握了多机器人集群控制的基本方法!现在来挑战更大的地图吧!
下载大地图程序:
点击 下载示例程序 2
这个程序包含了:- 600x600地图的坐标映射
- 八个机器人的基础控制框架
- 可扩展的编程积木组合```
-
-