¶ X1/IE1500 故障排除
注意:以下内容仅适用于图示主控器和遥控器及其配套产品
|

|
¶ 故障排除方法
当机器人出现无法正常操控的情况时,可按如下步骤排查机器人状态,定位问题。
- 请确保机器人拼装正确;
- 确保线路连接正确(电池、武器电机及电调、运动模块、接收机、武器解锁卡卡槽等均正确连接,线路未出现断裂或焊点脱落的现象,运动模块的两个插头插在开关螺丝左右两侧,未插在后方两插座内);
- 确保机器人与遥控器使用同一版本的固件(同为V1.1或同为V1.2),且了解该模式下运动和武器的操作方法;
- 确保机器人与遥控器电量充足;
- 排除以上问题后,可根据各部件灯效或音效判断机器当前状态,定位问题来源。
排查机器人故障时,请先开启遥控器,将机器人的轮子保持稳定的悬空状态并拆下武器皮带,然后旋合机器人开关。
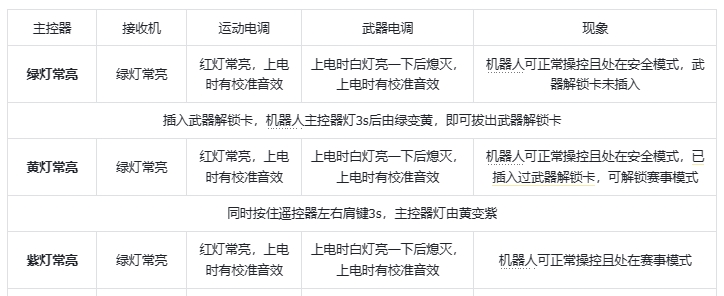
正常状态下,各部件灯效如下表所示
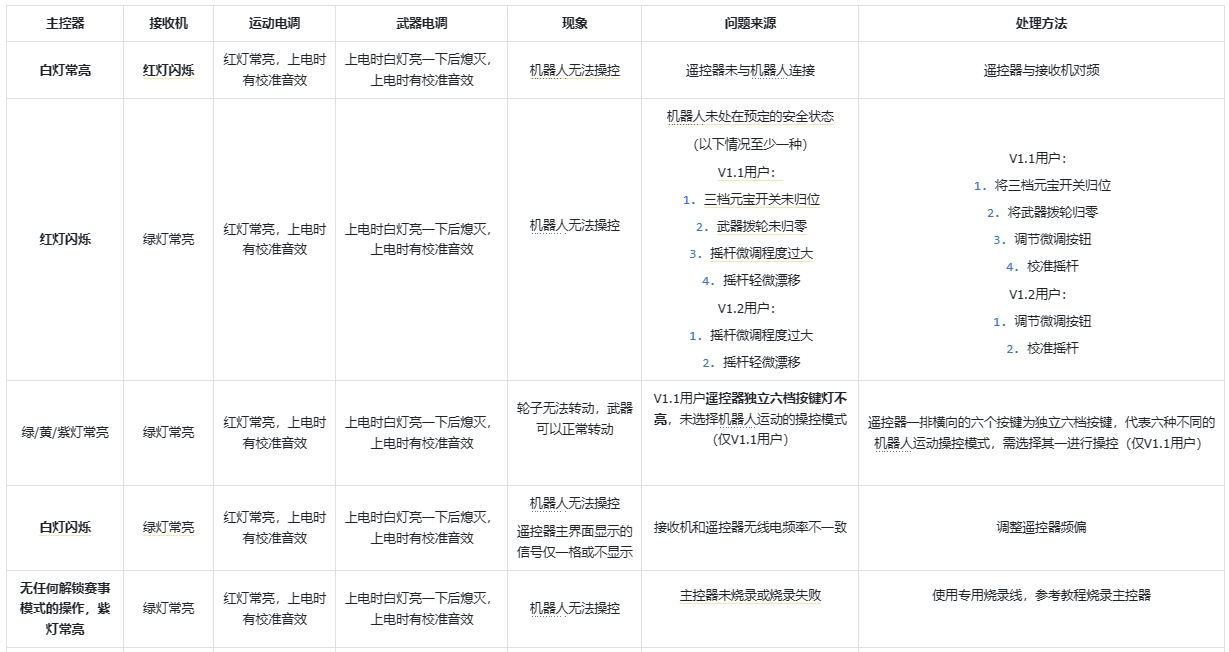
以下为可能出现的异常情况及其处理方法
¶ 常见问题解答
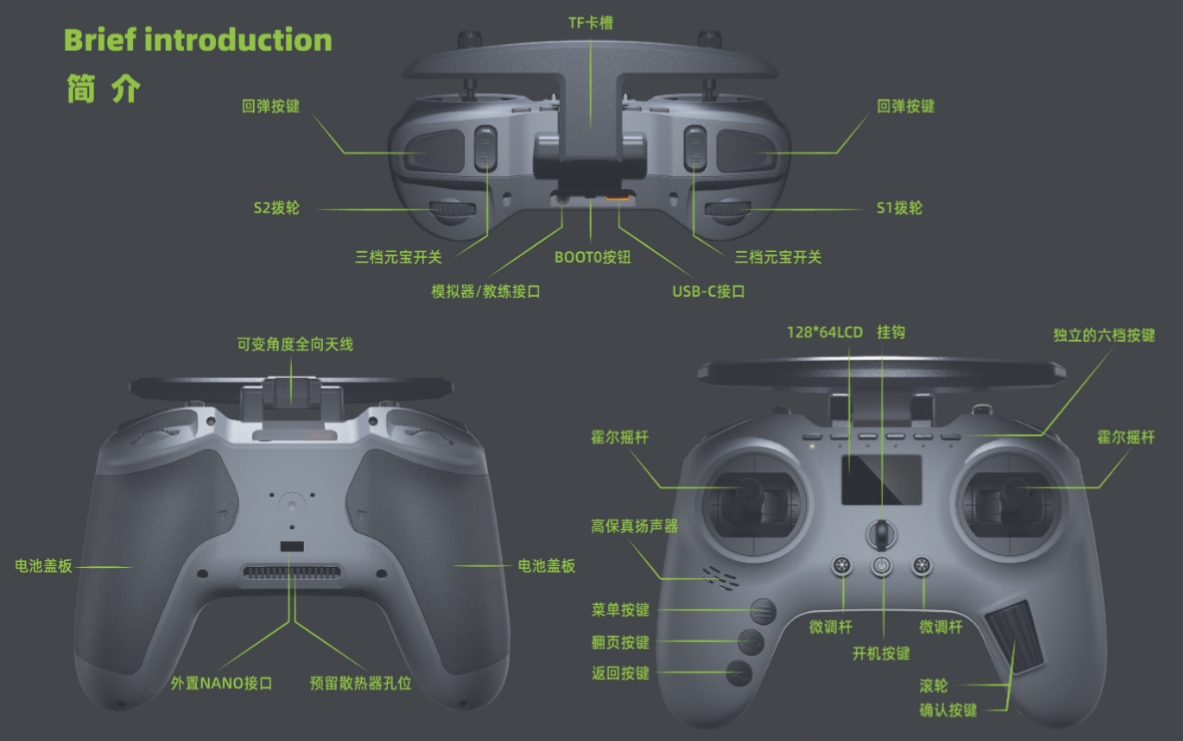
¶ 遥控器各按键名称
¶ 遥控器与接收机如何对频?
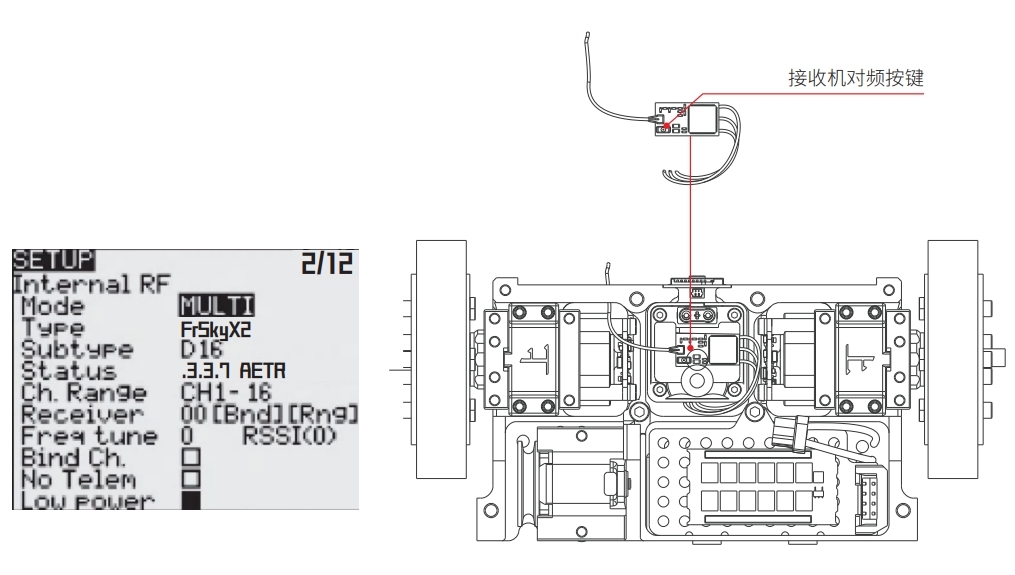
接收机安装于机器人的主体内部。使用时需将遥控器和接收机进行对频,请按照如下方法操作:
- 在机器人主体内部找到接收机,接收机对频按键位于接收机上。
- 打开需要对频的遥控器,短按菜单按键进入设置页面,使用翻页键切换至2/12 SETUP页面,然后使用滚轮找到如图所示“Internal RF”。按图示确认页面信息(若Mode、Type和Subtype栏信息与图示不一致,请按图示修改),然后停留在Receiver栏的【Bnd】位置。
- 打开机器人,确保接收机已经供电。此时接收机LED指示灯为红灯闪烁。
- 长按接收机对频按键6s,对频过程中接收机LED指示灯为红、绿灯同时常亮。
- 通过遥控器滚轮按钮点击Receiver栏中的Bnd,点击“Ch1-8 Telen ON”,等待对频完成。此时接收机LED指示灯为红灯闪烁、绿灯常亮。
- 完成以上步骤后,接收机尚处于对频模式,在此状态下无法正常操作机器人,需要重新启动机器人以退出对频模式,此时机器人方可正常使用。
提示:遥控器与接收机对频时请保持两者尽量靠近,并且保证附近无其他已开启的遥控器
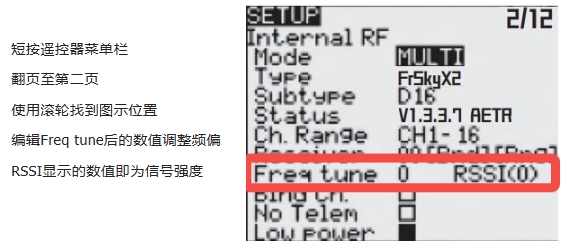
¶ 为什么要调整遥控器频偏,如何调整遥控器频偏?
理论上接收机和遥控器的无线电频率不可能完全一致,在频偏不多时,并不容易被发现,但不代表频率很准确,我们强烈建议,在对频时进行频率校准,以获得更稳定的连接程度和更远的通讯距离。
- 对频成功后,将接收机和遥控器保持2米的固定位置缓慢增加Freq tune的值,直到接收机与遥控器断开连接(接收机灯由绿变红或主控器灯由绿变白的临界点),记录下此值;
- 再缓慢减小Freq tune的值,直到接收机与遥控器断开连接,记录下此值;
- 然后计算出这两个值之间的中间值,填入Freq tune。
例如:Freq tune失控值分别是“20”和“-20”,那么Freq tune需要填入“0”Freq tune失控值分别是“10”和“-30”,那么Freq tune需要填入“-10”
此时接收机和遥控器的无线电频率完全一致,您将获得最佳的控制。
¶ 为什么要校准遥控器摇杆,如何校准遥控器摇杆?
遥控器摇杆出现了小幅偏移,导致其未处于零位,此时可能出现机器人无法被控制,或未操控摇杆时机器人轮子自行转动。
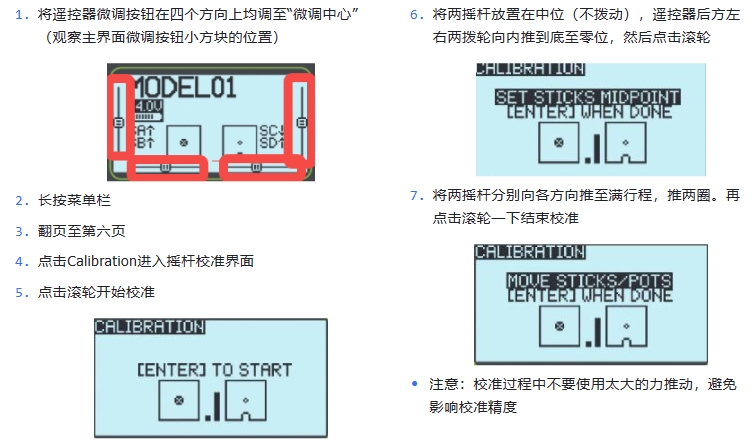
校准完成后,主控器红灯闪烁将变为绿灯常亮(未插入武器解锁卡)/黄灯常亮(插入武器解锁卡),遥控器“输出监视”界面各通道数值接近0(误差±1),即为校准成功。
¶ 机器人前进时走不直怎么办?
由于地面摩擦不同、机器人重心不同、减速电机存在差异等问题,机器人在前进时走不直属于正常现象。如果出现严重的偏移,可以按如下步骤进行调整:
- 请确保机器人安装正确,机器人主控器程序为V1.2,遥控器程序也为V1.2
- 校准遥控器摇杆(步骤见上文)
- 在具有安全保护的空间内开启遥控器及机器人,将遥控器左摇杆持续向前推,观察机器人运动轨迹。
- 若机器人向左偏移,则将右边微调按键向右轻推一下。再次尝试持续向前推动左摇杆,观察机器人运动轨迹。多次调整直至机器人前进轨迹基本不偏移。
若机器人向右偏移,则将右边微调按键向左轻推一下。再次尝试持续向前推动左摇杆,观察机器人运动轨迹。多次调整直至机器人前进轨迹基本不偏移。
¶ 武器PU带断了怎么办?
在长度允许的情况下,PU带可重新熔接后继续使用(当PU带的长度变短过多或表面出现明显裂纹时建议更换新PU带。在工具箱内可以找到备用PU带。新PU带建议裁剪长度:横转机型300±2mm,转鼓机型180±2mm)。
PU带的熔接方法:将断裂的PU带两端使用打火机烧至融化后对接在一起,尽量对准以保证PU带在熔接位置处的外观过渡平滑。熔接过程需要约30s完成定型,完成定型后需要继续冷却5分钟以达到最高强度,在此期间请确保被熔接的PU带两端相对静止。冷却结束后,给熔接位置反复施加约2kg的拉力3-5次确保熔接可靠。确认熔接效果后,使用水口钳修剪熔接处至无明显凸起即可。
¶ 遥控器为什么无法开机?
首先检查遥控器是否正常供电
- 打开遥控器电池盖板,检查电池是否松动,若电池松动,可适当向外掰动遥控器与电池接触的金属片,以保证接触良好。
- 若电池接触良好,但依旧无法开机,可将遥控器电池取出,使用万用表测量电池电压。若单节电池电压低于2.75V,即有可能是电池过放导致的电池损坏,因此遥控器无法开机,更换电池即可解决(两节同型号18650电池)
排除以上问题后,可尝试给遥控器充电约5个小时(充电时,充电口旁充电指示灯绿灯常亮,充满时绿灯熄灭),若充电后依旧无法开机,可联系售后解决。
¶ 机器人部件损坏如何处理?
- 若机器人出厂时部件即为损坏状态,可凭相关证明联系售后处理。
- 若在保修期内机器人出现非用户原因导致的部件损坏,可凭相关证明联系售后处理。
- 若部件因用户原因导致损坏或在保修期外损坏,部分部件可零售,可浏览淘宝“玄智科技官方企业店”购买您所需要的部件。
¶ 为什么机器人和遥控器功能一切正常,但在开机状态下放置一段时间后,机器人持续发出“滴滴”的响声?
开机状态下机器人各电机长时间不转动时,电机即会发出“滴滴”的响声,此时使用遥控器操作武器和轮子转动即可。操作时请注意安全,机器人长时间不操作时建议关机放置。